HapticMotor模拟研究
Veröffentlicht in 2025
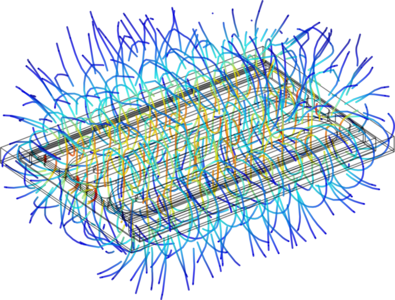
触觉反馈马达作为近年来人机交互领域的重要创新,其性能优化高度依赖于多物理场耦合仿真技术。基于COMSOL Multiphysics平台,介绍了该类马达的建模与分析流程:首先通过磁场模块精确计算电磁驱动力,随后在固体力学物理场中开展模态分析以获取马达固有频率(F0);最终结合瞬态动力学求解器,实现了对马达加速度响应、瞬态振动特性及启停时间等关键动态参数的定量评估。该仿真框架为触觉执行器的优化设计提供了完整的虚拟原型验证方案。