Training von Unterwasserfahrzeugen zur Visualisierung von Strukturen unter der Wasseroberfläche
Die University of Southern Mississippi entwickelt Simulations-Apps, um maschinelles Lernen in das Training von unbemannten Unterwasser- und Oberflächenfahrzeugen zu integrieren.
Von Joseph Carew
April 2025
An einem ruhigen Tag vor der Küste von Mississippi wird ein kleines Oberflächenfahrzeug in einem Testgebiet methodisch hin und her gezogen. Diese Sensorplattform mit einer geringen magnetischen Signatur ist damit beschäftigt, den Meeresboden nach ferromagnetischen Zielen abzusuchen. Die Scans sind nur ein Teil eines ehrgeizigen Projekts, das vom Roger F. Wicker Center for Ocean Enterprise der University of Southern Mississippi (USM) durchgeführt wird. Durch eine Kombination aus Modellierung, Simulation und maschinellem Lernen (ML) legen die Forscher der USM den Grundstein für intelligente unbemannte Unterwasserfahrzeuge (UUV), die autonom agieren und präzise aufdecken können, was unter den Wellen verborgen liegt.
Modellierung ferromagnetischer Strukturen auf dem Meeresboden
Auf dem Grund der meisten Häfen (und generell auf dem Meeresboden) befinden sich ferromagnetische Materialien wie anthropogene Strukturen und Trümmer, sogar nicht detonierte Sprengkörper. Um zu verhindern, dass der Hafenverkehr mit diesen Gefahren kollidiert, müssen Seekarten deren Positionen genau wiedergeben. Eine der effektivsten Methoden zum Scannen solcher magnetischen Anomalien unter Wasser ist der Einsatz von UUV mit moderner Sensorausrüstung. Diese Fahrzeuge bringen jedoch gewisse Herausforderungen mit sich, da sie teuer in der Herstellung und ihre physischen Scans komplex sind und sie aufgrund erheblicher Plattform- und Umgebungsgeräusche (wie Wind und Wellen) nicht immer ein genaues Bild liefern. Erschwerend kommt hinzu, dass bestimmte Signaturen des Meeresbodens nicht eindeutig sind, sodass Scans unterschiedlicher Unterwasserkonfigurationen ähnlich aussehen können. Ein Team der USM untersucht, wie diese Herausforderungen bewältigt werden können, um den Weg für eine bessere UUV-basierte Sensorik und Kartierung zu ebnen.
„Wir führen zahlreiche datengestützte Tests und Bewertungen neuer unbemannter Systemplattformen durch – sowohl unter Wasser als auch an der Oberfläche (Abbildung 1) – und beschäftigen uns mit der Integration hochentwickelter Sensoren“, erklärt Dr. Jason McKenna, Forscher an der USM. „Insbesondere untersuchen wir die Integration von Magnetsensoren in UUV, wo es viele Umgebungs- und Plattformgeräusche gibt.“ Das Forschungsteam nutzte Modellierung (validiert durch empirische Daten), Simulations-Apps und maschinelle Lerntechniken, um ein Computersystem zu entwickeln, das in ein UUV integriert werden kann, um die automatische Zielerkennung (automatic target recognition, ATR) zu verbessern und die Genauigkeit der vom Fahrzeug registrierten Magnet- und letztlich Gravitationsfelddaten zu erhöhen.

Nicht ganz 20.000 Meilen unter dem Meer
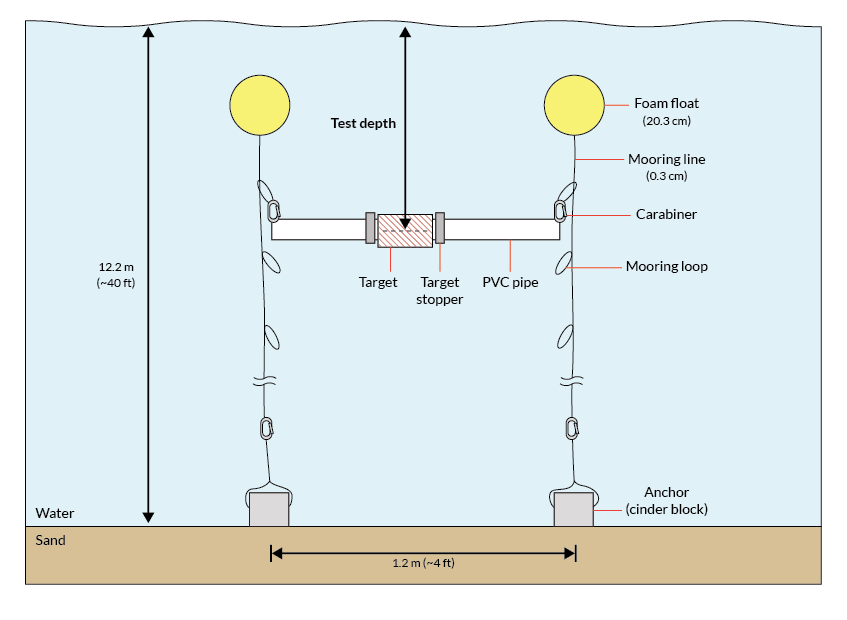
Vor der Erstellung der Modelle musste das Team reale Daten erheben, die zum Benchmarking und zur Validierung der Modelle verwendet werden konnten. Dazu begab sich das Team in eine kontrollierte Meeresumgebung mit bekannten Zielen, die mit hochpräzisen Schwerkraft- und Magnetsensoren vermessen wurden. Das physische Experiment fand in der Nähe des Golfs von Mexiko statt, wo das Team mithilfe eines Windensystems eine Sensorplattform 70 Meter zwischen zwei Punkten zog. Unter der Wasseroberfläche scannte die Sensorplattform eines von zwei Zielen: einen 20,3 cm langen, senkrecht stehenden zylindrischen Magneten mit einem Durchmesser von 2,5 cm (Abbildung 2), oder ein 30,5 cm langes, waagrecht liegendes Stahlrohr mit einem Durchmesser von 11,4 cm (Abbildung 3). Das Team wiederholte diesen Vorgang mehrmals für jedes Ziel, wobei sich die Behälter mit dem Magneten oder dem Rohr in Tiefen von 1 Meter, 3 Metern und 5 Metern befanden.
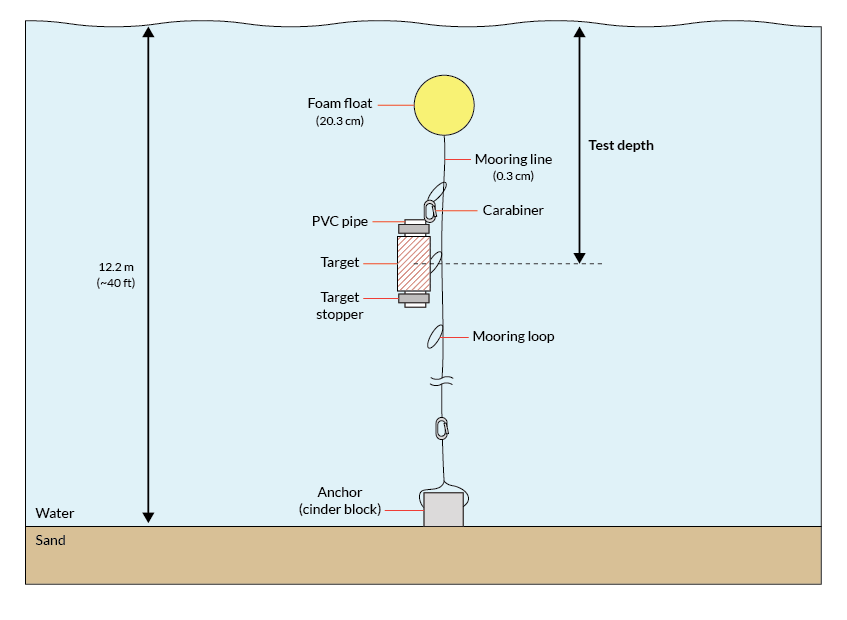
„Die Physik, von der wir hier sprechen, unterliegt einem Zerfall über r hoch 3, sodass das Magnetfeld sehr schnell abfällt“, erklärt McKenna. „Wenn man etwas beobachten möchte, muss man sich in der Nähe des Ziels befinden. Daher wird bei archäologischen Untersuchungen das Magnetometer in der Regel so weit vom Schiff entfernt gezogen, dass es nicht durch dessen Signatur gestört wird, und auch nur wenige Meter über dem Meeresboden.“
McKenna erklärt, dass sein Team einen Magneten verwendet hat, der eine stärkere Signatur erzeugt hat, als der Sensor wahrscheinlich in der Praxis vorfinden würde. Dies war bewusst so gewählt.
„Die von uns verwendeten Daten sind nie so sauber, aber dieses Experiment zeigt, dass man mit dem richtigen Ansatz, der richtigen Physik und den richtigen Randbedingungen eine gute Annäherung an das erreichen kann, was man bei einzelnen Zielen erleben würde“, so McKenna. „Dann beginnt man, alle diese Ziele zusammenzufassen, Plattformrauschen einzuführen und erhält so sehr komplexe Ergebnisse.“
Entwicklung von Modellen für die Erzeugung synthetischer Daten
Nach Abschluss der physikalischen Experimente musste das USM-Team mehrere Schritte durchlaufen, um die Algorithmen zu erhalten, die zur Verbesserung der Leistung der UUV erforderlich waren. Letztendlich umfasste der Prozess die Erstellung von Potentialfeldmodellen und die Durchführung von Unsicherheitsquantifizierungsanalysen (UQ), die Erstellung von Simulations-Apps auf der Grundlage der validierten Modelle, mit denen ML-Algorithmen trainiert werden können, und schließlich die Verwendung dieser Algorithmen zum Trainieren der ML-Modi, um die UUV bei der Erkennung von Objekten von Interesse zu unterstützen.
Potentialfeldmodelle
McKenna und sein Team verwendeten die Simulationsplattform COMSOL Multiphysics® zusammen mit dem AC/DC Module, um Potentialfeldmodelle zu erstellen. Diese Modelle können die Wechselwirkungen zwischen magnetischen, gravitativen oder thermischen Feldern und Objekten darstellen und sind daher für die Quantifizierung der Signaturen des Meeresbodens und der darauf befindlichen Objekte unerlässlich.
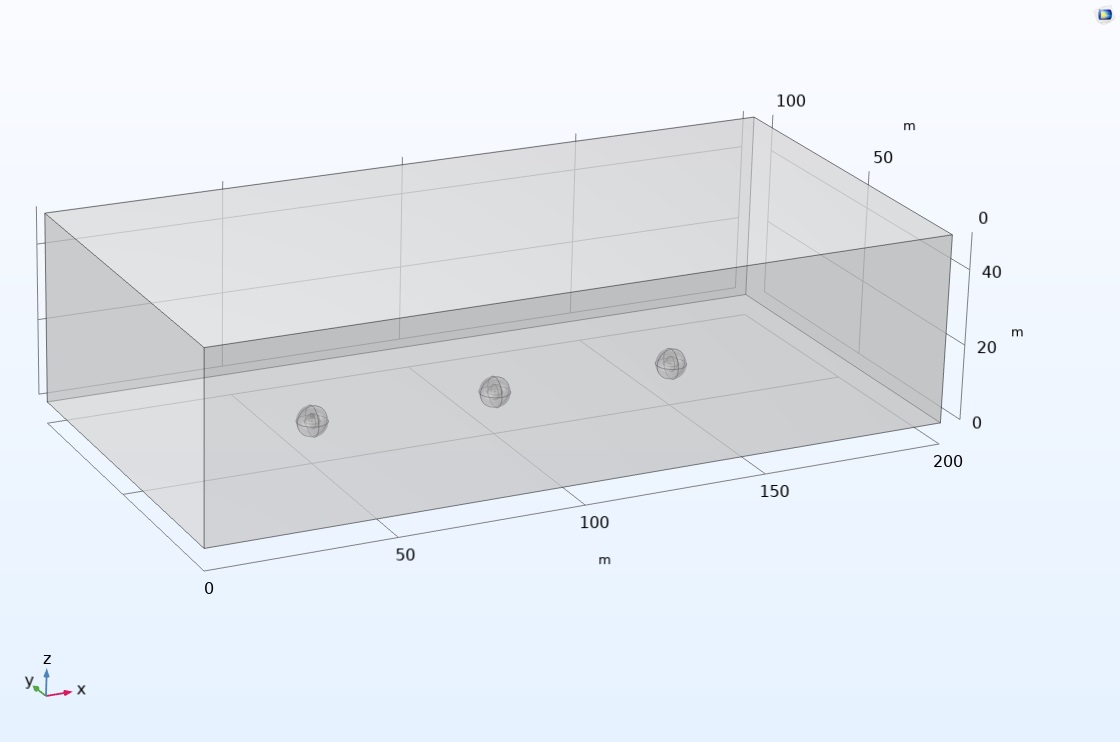
Zunächst definierte McKenna die physikalischen Eigenschaften des Zielobjekts und erzeugte eine Reihe von Zielen, um mithilfe des integrierten Interfaces Magnetic Fields, No Current der Software eine Testumgebung zu erstellen. Anschließend führte er die räumliche Konfiguration mit niedrigen (30,5 cm), mittleren (70 cm) und hohen (91,4 cm) magnetischen Zielen im Simulationsraum ein (Abbildung 4). Schließlich berechnete er die Wechselwirkungen der Ziele mit dem umgebenden Medium. Die Schwerkraft- und Magnetanomalien (die Ziele) wurden anschließend aus verschiedenen UUV-Simulationen aufgezeichnet, wodurch ein großer Datensatz entstand, der die Nuancen der Potentialfeldschwankungen in verschiedenen Szenarien erfasste. Um diese UUV-Simulationen zu untermauern, verwendete das Forschungsteam UQ-Analysen.
Bestimmung von Variablen mit Unsicherheitsquantifizierung
UQ-Studien wurden in den Prozess des Teams integriert, um die Rolle der Unsicherheit bei der Modellierung des Betriebs eines UUV zu untersuchen und Lücken bei Parametern zu schließen, die in einem realen Experiment nicht repliziert werden konnten. Insbesondere führte McKenna eine Screening- und Sensitivitätsanalyse mit dem Uncertainty Quantification Module durch, einem weiteren Add-On zu COMSOL Multiphysics. Das Modul dient als allgemeines Interface zur Charakterisierung von Unsicherheiten und zur Propagierung von Input-Unsicherheiten in Modellen sowie zur statistischen Analyse der relevanten Output-Größen.
„Die Quantifizierung der Modellunsicherheit war relativ intuitiv“, sagt McKenna. „Wir wollten eine Screening-Analyse durchführen, die derjenigen ähnelt, die wir mit einer Hauptkomponentenanalyse durchgeführt hätten. Dies ist eine elegante Methode, um die Abhängigkeit vieler Variablen zu untersuchen.“
McKenna und sein Team konnten die erwarteten Parameterbereiche der ferromagnetischen Strukturen oder Geräte identifizieren, die sie mit den Scans messen wollten. Sie konnten die Ziele anhand ihrer Länge, Wandstärke und magnetischen Suszeptibilität parametrisieren und anschließend die Auswirkungen der Erdmagnetfelder (die hauptsächlich für die Induzierung der Signatur in den von den UUV gescannten metallischen Objekten verantwortlich sind) einbeziehen. Die Erkenntnisse über den nutzbaren Bereich dieser Parameter ermöglichten eine einfache Neukalibrierung und Lösung der Potentialfeldmodelle, sodass verschiedene UUV-Läufe repliziert werden konnten, die das Team normalerweise Tage auf dem Wasser gekostet und enorme Rechenkosten verursacht hätten.
Durch Variation der magnetischen Breite, Länge und Stärke des Kraftfeldes um plus oder minus x Prozent konnte das Team die Auswirkungen der Veränderungen messen. „Auf diese Weise kann man eine Sensitivitätsanalyse durchführen. Mithilfe der Unsicherheitsquantifizierung lassen sich diese Wertebereiche ermitteln, um ein gewisses Verständnis zu entwickeln und festzustellen, ob die Messungen den Erwartungen entsprechen“, erklärt McKenna. „Innerhalb von wenigen Minuten bis zu einer Stunde können wir einen umfangreichen und robusten Trainingssatz für die ML-Algorithmen aufbauen.“
Von validierten Modellen zu ML-Trainings-Apps
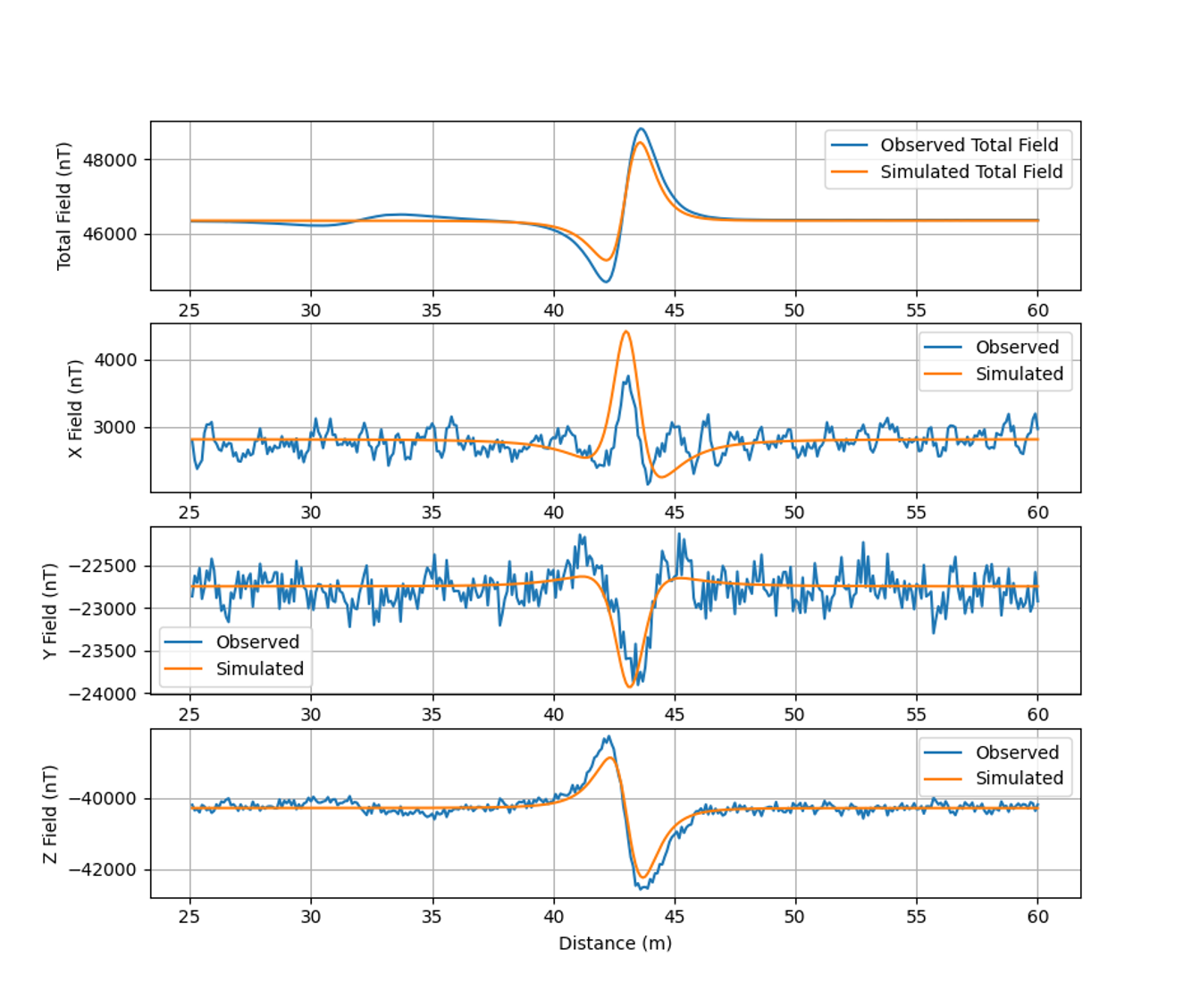
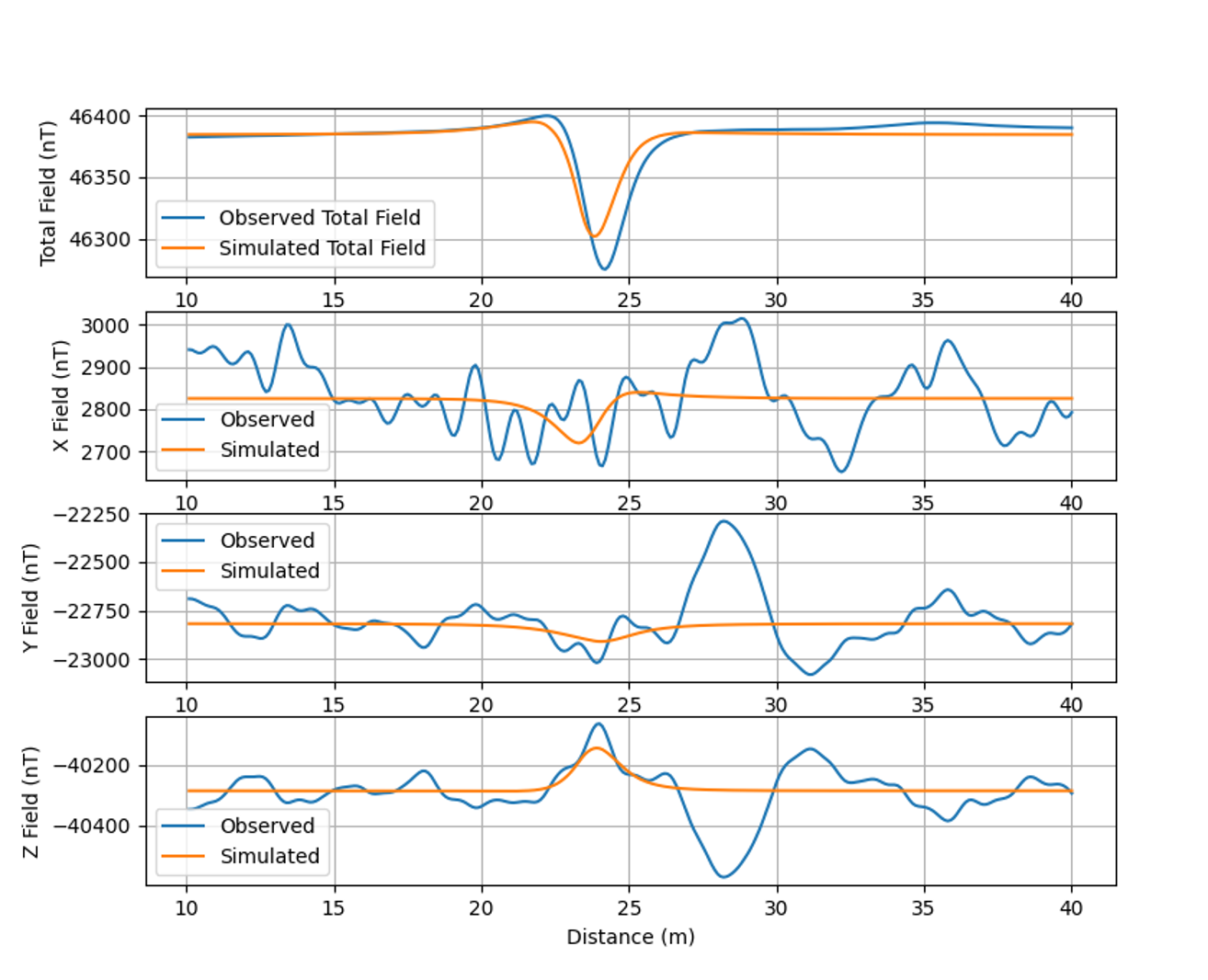
Nachdem die Unsicherheitsquantifizierungsstudien abgeschlossen und die Potentialfeldmodelle erstellt waren, konnte McKenna die Ergebnisse der Simulation mit seinen realen Experimenten vergleichen (Abbildung 5). Er erstellte mehrere vereinfachte Modelle für den Vergleich und erzielte viele aussagekräftige Ergebnisse, die weitgehend übereinstimmten.
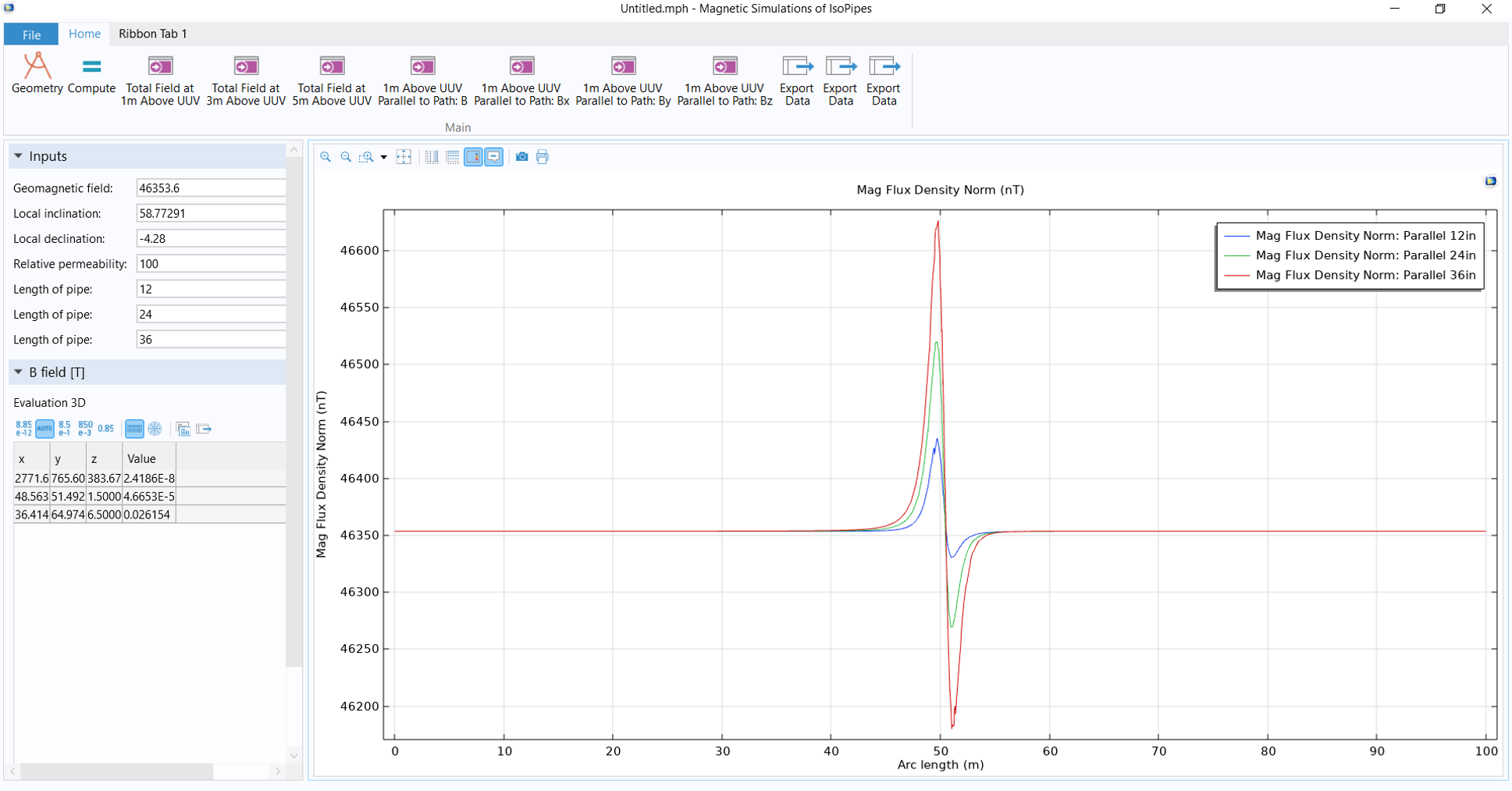
Die positiven Ergebnisse veranlassten McKenna, die validierten Modelle zur Erstellung von Simulations-Apps (Abbildung 6) für das Data-Science-Team zu verwenden, das für ML-Algorithmen Zugriff auf eine große Menge an Trainingsdaten benötigt. McKenna nutzte den Application Builder in COMSOL Multiphysics, um die intuitiven Apps zu erstellen, die es den Wissenschaftlern ermöglichen, ML-Trainingsdaten zu generieren.
„Ich konnte die Apps anhand einiger Beispiele erstellen und innerhalb von ein bis zwei Stunden zum Laufen bringen“, so McKenna. „Man kann verschiedene Parameter eingeben, und wenn man diese ändert, ändern sich die Feldlinien, was genau unseren Anforderungen entspricht.“
Das Data-Science-Team muss sicherstellen, dass die Modelle diese Datenpunkte erfassen können. Mit COMSOL® ist dies möglich, ohne das Modell ständig überwachen zu müssen. Das Data-Science-Team kann die Parameter variieren und eine Vielzahl von Signaturen entwickeln, die die UUV voraussichtlich erkennen und scannen müssen. Die Simulations-Apps liefern der USM die Daten in der für das Training der Algorithmen erforderlichen Qualität und Quantität.
Mithilfe der Apps konnte die USM die Forschungsarbeit so aufteilen, dass jedes Team sein Fachwissen optimal einbringen konnte. „Jeder konnte in seinem Wissensbereich produktiv arbeiten“, so McKenna. „Für so ein Vorhaben braucht man ein Team.“
Maschinelles Lernen
Die vom Team verwendeten ML-Techniken umfassten Long Short-Term Memory (LSTM) Network, Regression, Tree Boosting und Deep Neural Network (DNN).
Die LSTM-Modelle wurden verwendet, um zu bewerten, wie sich die Vorhersagefähigkeiten bei der Ausführung auf simulierten Sensorsequenzdaten veränderten. Diese Bewertung konnte weiterverwendet werden, um zu bestimmen, ob die Simulation effektiv zur Datenvergrößerung für Beobachtungsdaten eingesetzt werden kann. Die Regressions-, Tree-Boosting- und DNN-Modelle wurden zur Bestätigung der Simulationsdatenmuster ausgewählt.
Diese Modelle wurden ausschließlich mit simulierten Daten ausgeführt, wobei die LSTM-Modelle mit einer Embedding-Sequenz von 10 Datenpunkten aus insgesamt mehr als 500.000 Datenpunkten betrieben wurden. Die Modelle sind mit Sequenzdaten kompatibel, einschließlich Zeitreihenanalysen, was sie besonders nützlich für die Interpretation von integrierten UUV-Sensordaten macht.
Wie in McKennas Beitrag für die COMSOL Conference (Ref. 1) erläutert, „bieten die aus unseren COMSOL-Modellen generierten synthetischen Datensätze vielfältige Trainingsbeispiele, anhand derer ML-Modelle die komplexen zeitlichen Beziehungen und Signaturmuster verschiedener Zieltypen erlernen können.“
As explained in McKenna's paper for the COMSOL Conference (Ref. 1), "The synthetic datasets generated from our COMSOL models provide diverse training examples, allowing ML models to learn the complex temporal relationships and signature patterns associated with different target types."
Ein Ausblick auf intelligente UUV
Auf dem Grund von Flüssen, Seen und Wasserstraßen befinden sich ferromagnetische Strukturen und Vorrichtungen, die aus Sicherheits- und Navigationsgründen erfasst werden sollten. UUV spielen eine wichtige Rolle bei der Verbesserung von Seekarten, auf denen diese potenziellen Gefahren markiert werden können, und tragen so zur Verbesserung der Navigierbarkeit von Häfen bei. Wenn beispielsweise eine Naturkatastrophe Schiffe versenken und Trümmer an unerwarteten Stellen zurücklassen würde, könnten intelligente UUV den Meeresboden schnell scannen und Aufschluss darüber geben, was sich unter der Wasseroberfläche befindet.
Das Forschungsteam der USM arbeitet an der Schnittstelle von Simulation und maschinellem Lernen, um die Vorhersagefähigkeiten von UUV zu verbessern. Dieses Projekt, das McKenna als „Blaupause für die Integration simulationsgesteuerter ML in verschiedene geophysikalische und technische Gebiete“ betrachtet, ist jedoch nur ein Schritt. Sein Ziel für die Zukunft ist es, seine Modelle komplexer zu gestalten und Phänomene hervorzuheben, die bisher noch nicht berücksichtigt wurden. Dazu gehören die Selbstentmagnetisierung größerer ferromagnetischer Objekte und die Einbeziehung physikalischer Phänomene wie Akustik und Wärmetransport. McKenna möchte seine Apps auch intern für Schulungen zu maschinellem Lernen über das App-Management-Produkt COMSOL Server™ einsetzen, realistischere Meeresbodenmodelle entwickeln und die Verwendung der Unsicherheitsquantifizierungsoptimierung an der USM vorantreiben.
Danksagung
Diese Forschungsarbeit wurde durch Mittel des Office of Naval Research unterstützt.
Referenz
- J. McKenna et al., "Potential Fields Modeling to Support Machine Learning Applications in Maritime Environments," COMSOL Conference 2024 Boston, 2024; https://www.comsol.com/paper/potential-fields-modeling-to-support-machine-learning-applications-in-maritime-environments-135922