Multibody Dynamics Module Updates
For users of the Multibody Dynamics Module, COMSOL Multiphysics® version 5.6 includes a new method for modeling rigid body contact and friction, clearance joints, and automatic joint creation. Learn about these and other multibody dynamics updates below.
Rigid Body Contact and Friction
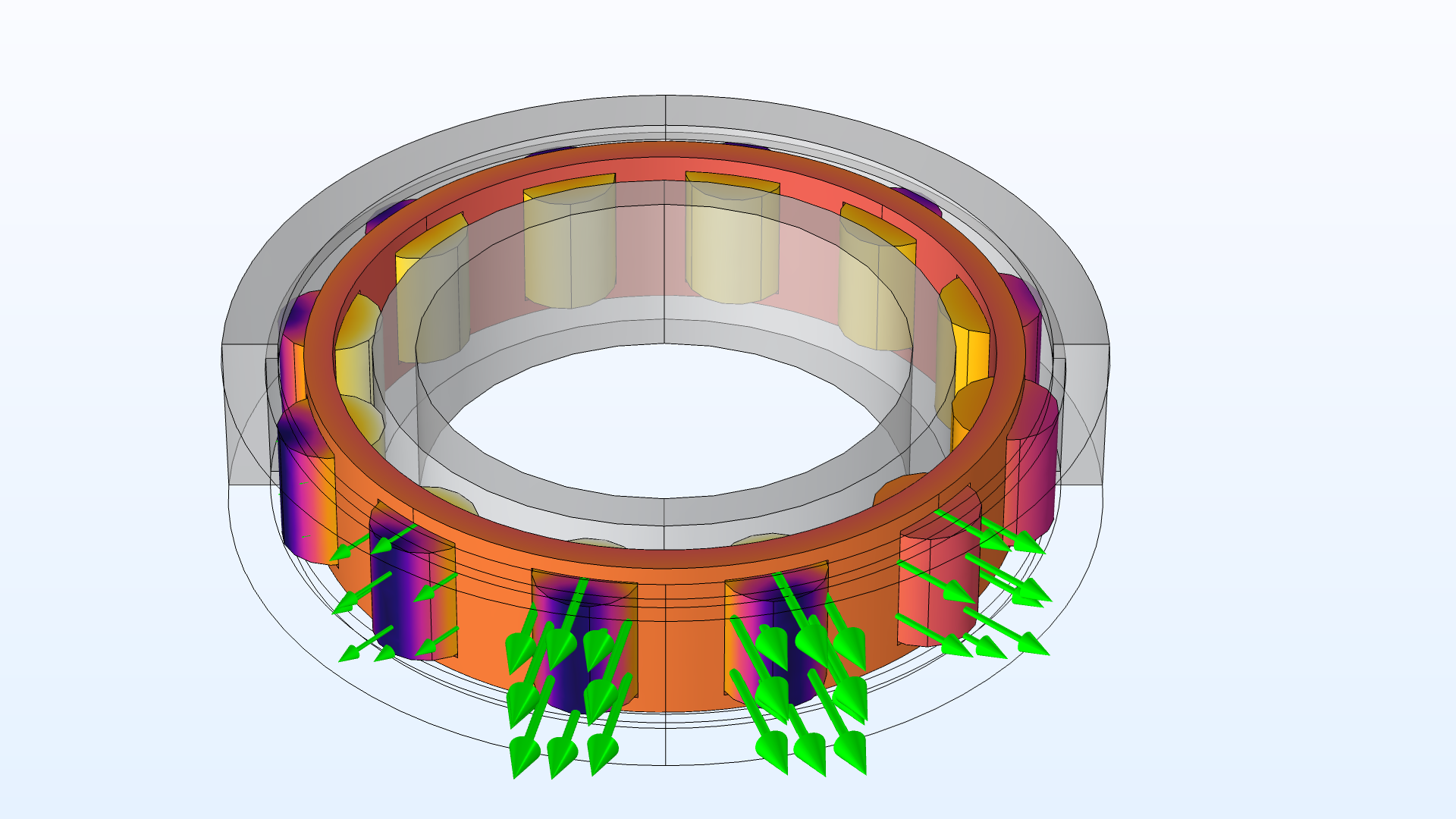
A new method for modeling contact between rigid bodies has been added in the Multibody Dynamics interface. The new method is available through the Rigid Body Contact node and is intended for modeling meshless contact between standard-shape rigid bodies. In this version, it allows Spherical-Spherical and Spherical-Arbitrary types of contact, where the former allows one of the spheres to be hollow with the inside concave boundaries as the contact surfaces. The contact formulation can be chosen as either Penalty or Penalty, dynamic and the friction force is modeled using a smooth and numerically robust continuous friction law that is available for time-dependent studies. You can see this functionality used in the new Dynamics of a Cylindrical Roller Bearing tutorial model.
Rigid body contact and friction in a cylindrical roller bearing with green arrows showing the contact force direction and relative magnitude.
Clearance Joint
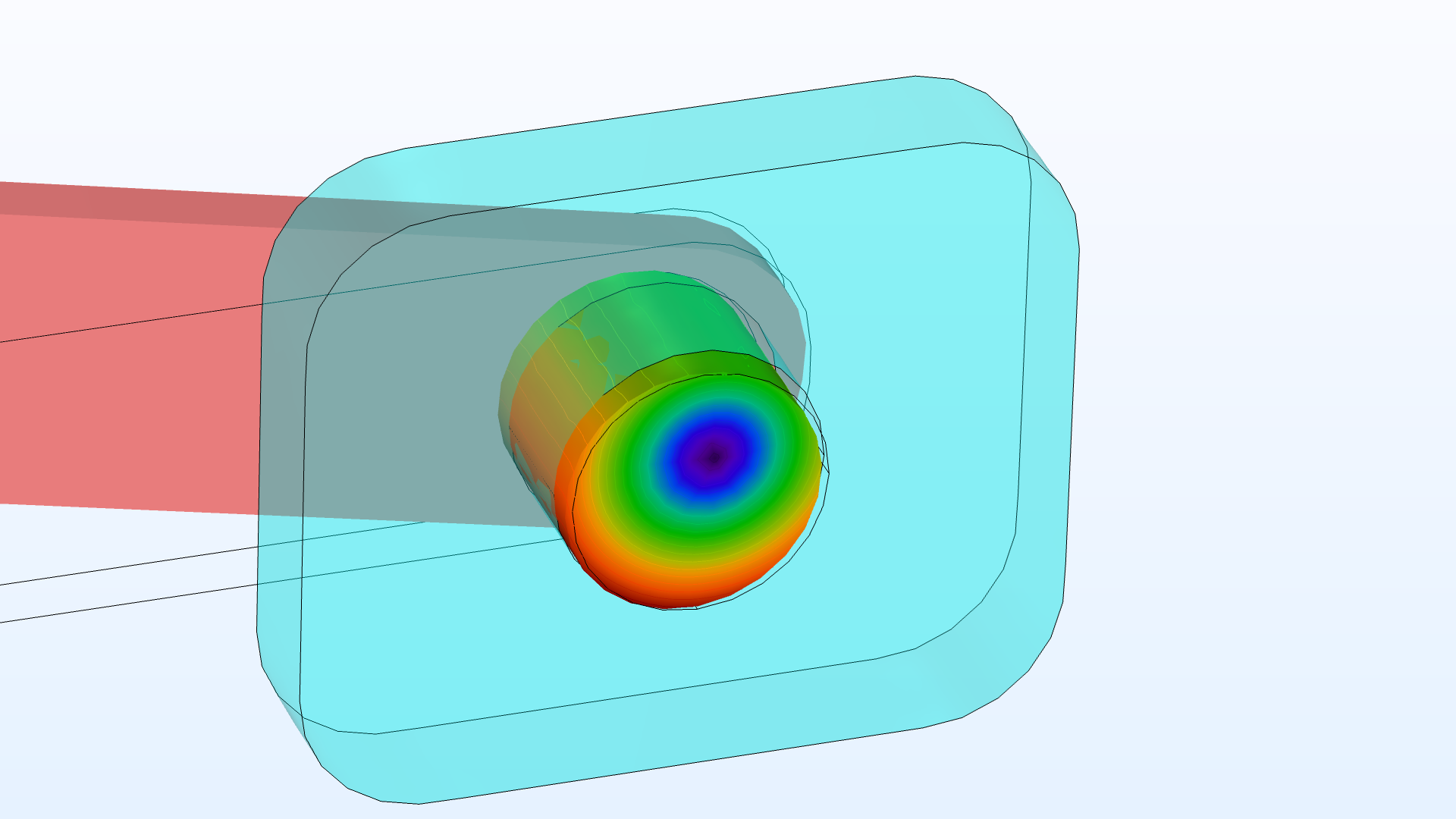
In real life, joints do not always fit perfectly, but have some clearance between the two components. To model an imperfect joint as such, you can use the new Clearance Joint node in the Multibody Dynamics interface. This new joint type allows for motion along all translational degrees of freedom within the clearance distance. A penalty method is used to enforce the distance constraint. It also allows for motion along the rotational degrees of freedom between the two connected components and behaves as a ball joint in 3D or a hinge joint in 2D. You can see this functionality used in the new Slider Crank Mechanism with Joint Clearance tutorial model.
Modeling of a clearance joint in a slider crank mechanism. Relative translation within the clearance distance along with the relative rotation can be observed between the two connected components.
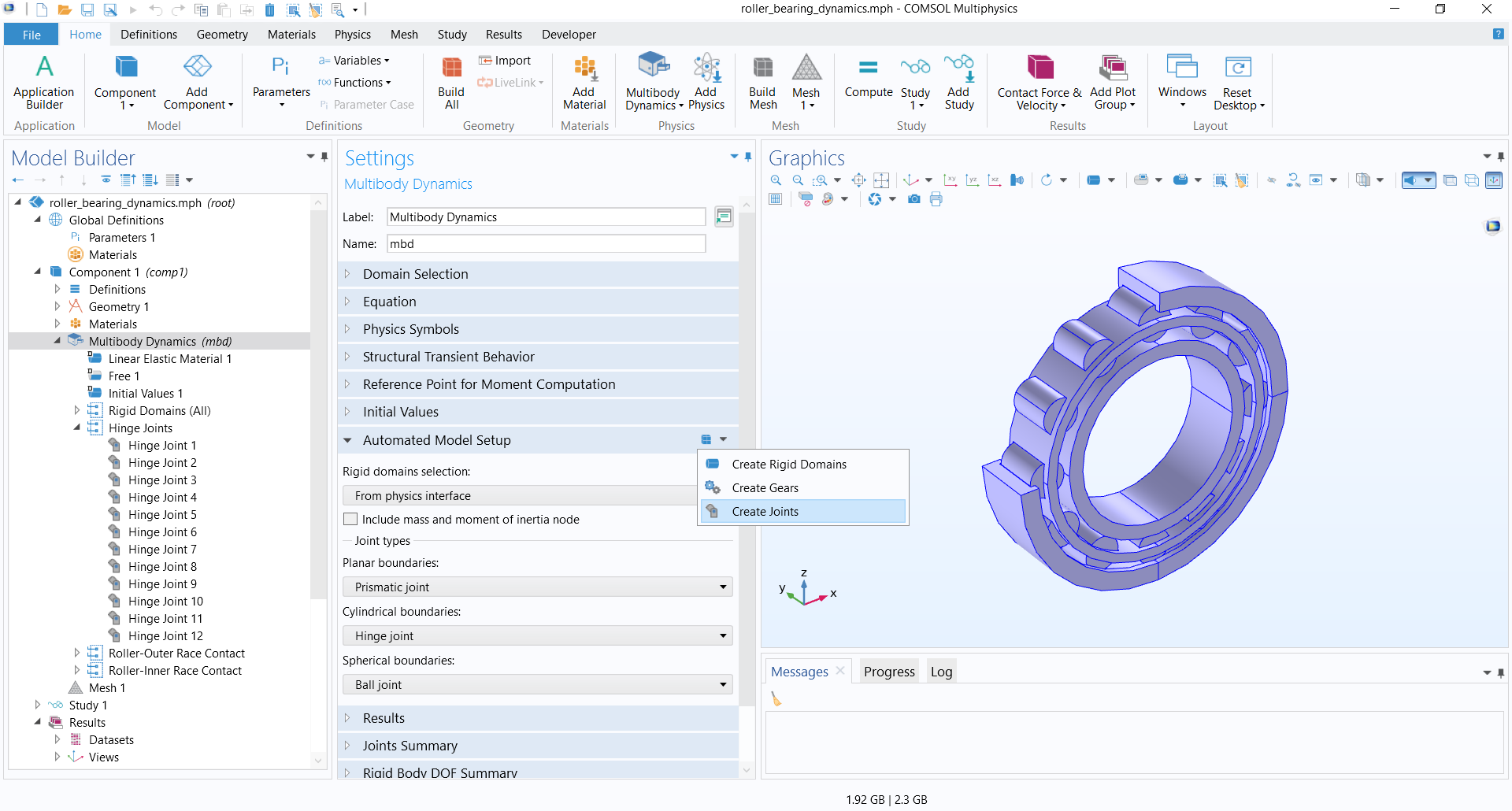
Automatic Joint Creation from Geometry
You can now create joints automatically from a geometry assembly, which makes model setup easier for large multibody systems. A new Create Joints button has been added in the Automated Model Setup section of the Multibody Dynamics interface. This button creates joints automatically for geometric objects in an assembly and forms Identity Pairs between them. By default, prismatic, hinge, and ball joints are created for planar, cylindrical, and spherical boundaries, respectively. It is also possible to choose any other appropriate joint for a particular type of boundary. The joints created in this way are automatically assigned source, destination, center, and axis information. You can see this functionality used in the following models:
- three_-_cylinder_reciprocating_engine
- reciprocating_engine_with_hydrodynamic_bearings
- slider_crank_mechanism_with_joint_clearance (new model)
- dynamics_of_a_cylindrical_roller_bearing (new model)
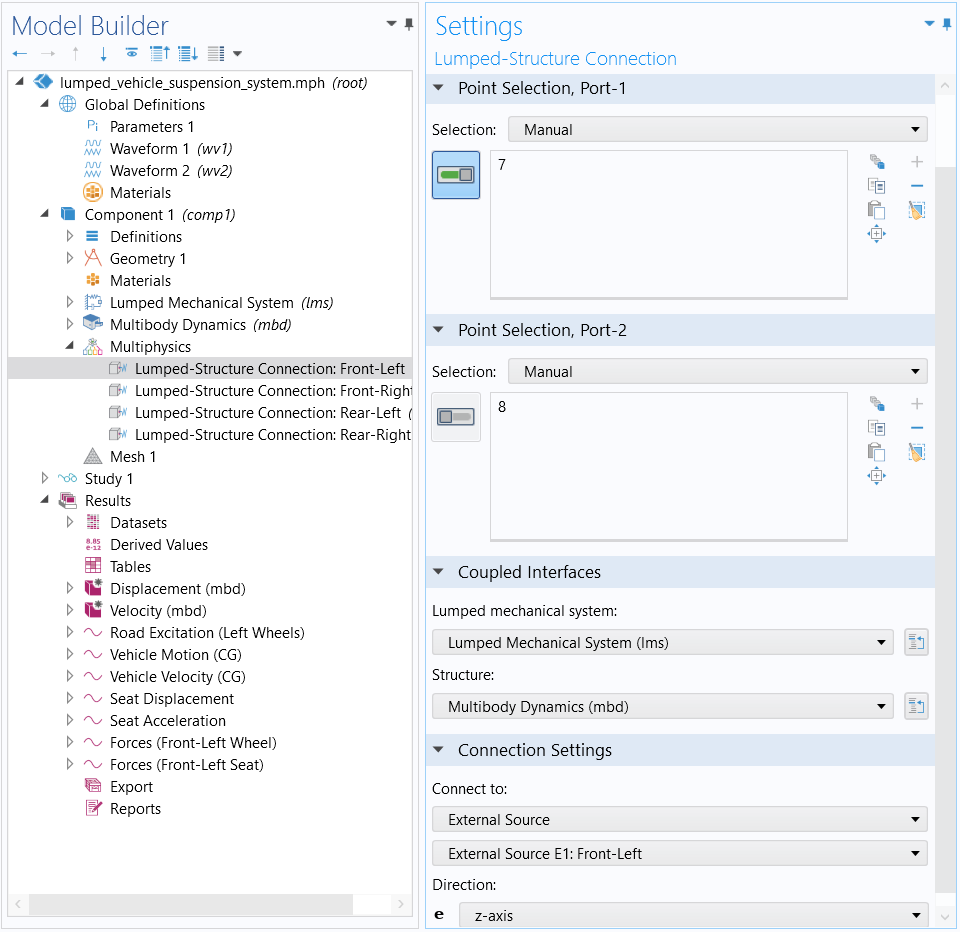
Lumped-Structure Connection Coupling
The new multiphysics coupling Lumped-Structure Connection has been added for connecting lumped systems modeled using the Lumped Mechanical System interface to the finite element models built using any structural mechanics interface. The connection in the Lumped Mechanical System interface can be made either using an External Source node or a Displacement Node, depending on whether the finite element component has two ports or only one port. You can see this functionality used in the Lumped Model of a Vehicle Suspension System tutorial model.
{kind=link}
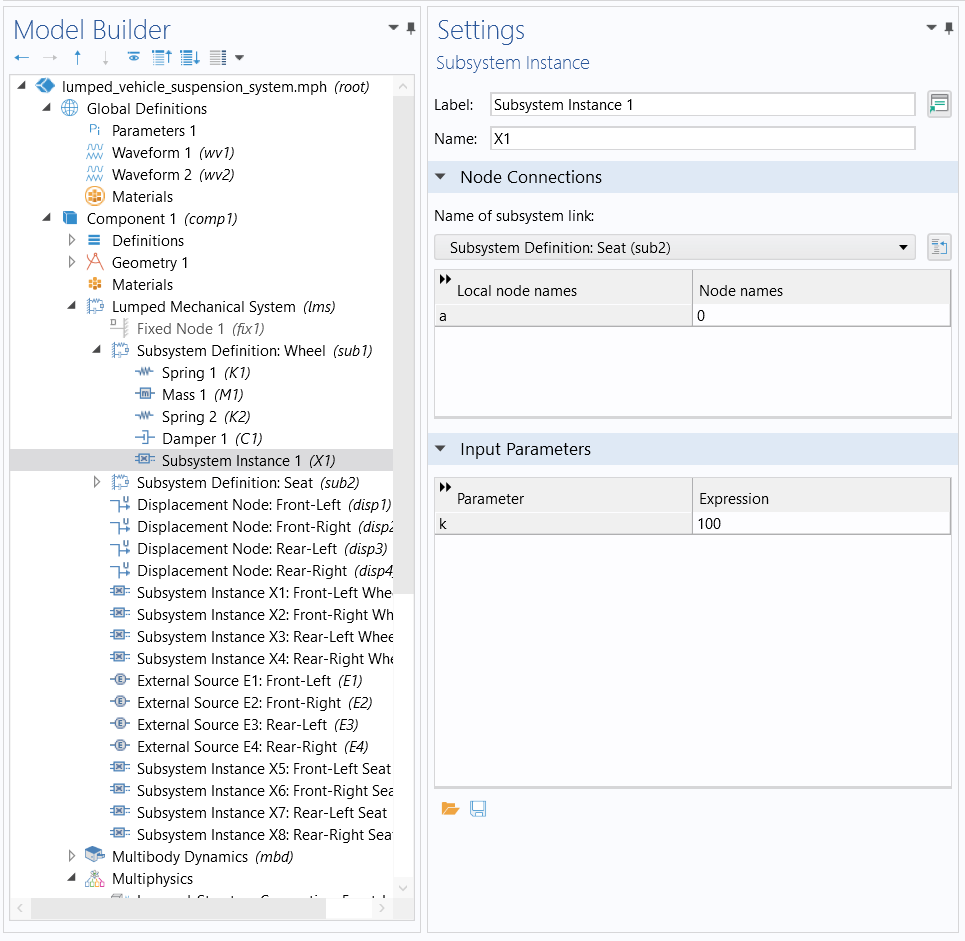
Lumped Mechanical System Modeling Enhancements
The Lumped Mechanical System modeling functionality has been improved in many aspects. Nested and parametric subsystems are now supported for lumped mechanical systems. Nested subsystems make it easier to model more complicated systems, while parametric subsystems allow for creating more general-purpose subsystem models. A new Input Parameters section has been added to the Subsystem Definition and Subsystem Instance nodes. Several subsystem instances can be used with different input parameters in the same model.
{kind=link}
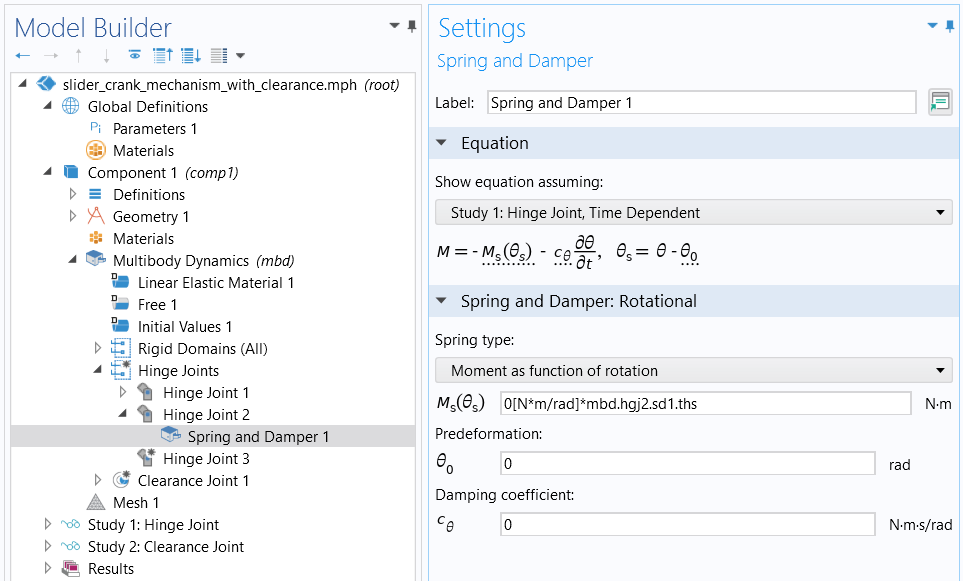
Nonlinear Spring in Joints
A new Spring type option has been added to the Spring and Damper subnode of all Joint nodes in the Multibody Dynamics interface. The Spring type option allows for specifying the Force as function of extension in addition to the existing option of specifying a Spring constant. You can use this to model a nonlinear spring attached to a joint by writing the spring force as a function of the extension. In joints having rotational degrees of freedom, you can instead specify Moment as function of rotation.
{kind=link}
Physics Symbol for Joints
Support for Physics Symbols has been added for all the Joint nodes, which are available in the Multibody Dynamics interface. The physics symbol used is different for each joint type and is placed at the center of the joint. In addition, connector lines are drawn from the joint center to all of the source and destination centers.
Dynamic Contact
New algorithms for dynamic contact provide a significant improvement of the conservation of momentum and energy during transient contact events. This means that you can accurately model transient contact problems with significantly larger time steps than in previous versions. The new methods are accessed by selecting either the Penalty, dynamic or Augmented Lagrangian, dynamic formulation in the Contact node. You can see this functionality in the new Impact Between Two Soft Rings and Impact Analysis of a Golf Ball tutorial models.
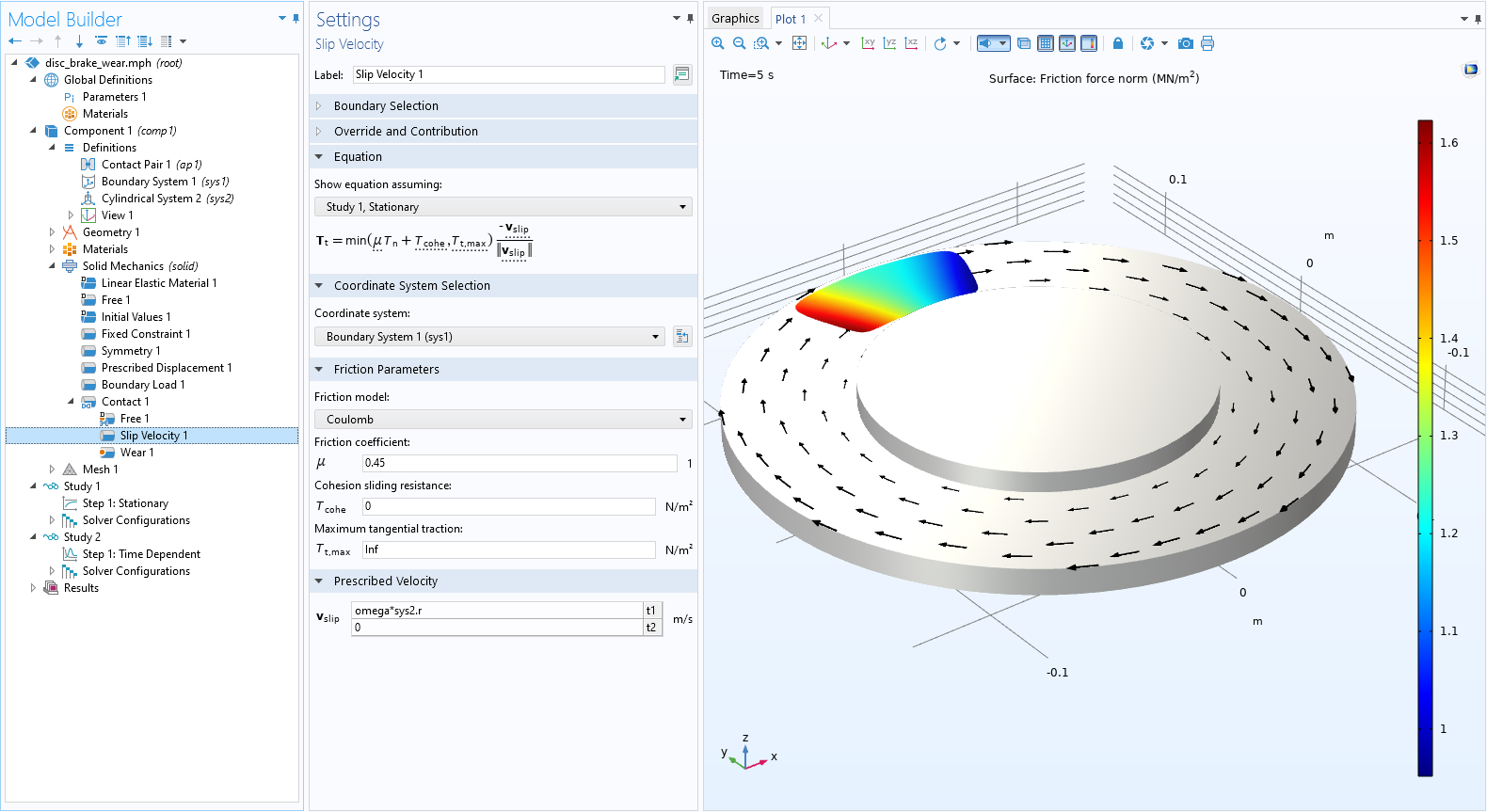
Simulation of Wear
Methods for modeling mechanical wear have been added in the form of a new Wear node, a subnode under Contact, available in the Solid Mechanics and Multibody Dynamics interfaces. The wear rate is based on a generalized Archard equation. There are two algorithms for wear modeling. For general wear, and arbitrary geometry changes due to the wear, a deformed geometry approach is used. There is also a simplified approach in which the wear is incorporated into the offset in the contact gap. You can see the Wear feature in the new Disc Brake Pad Wear tutorial model.
Development of wear in a disc brake pad (the velocity arrows are just for visualization purposes).
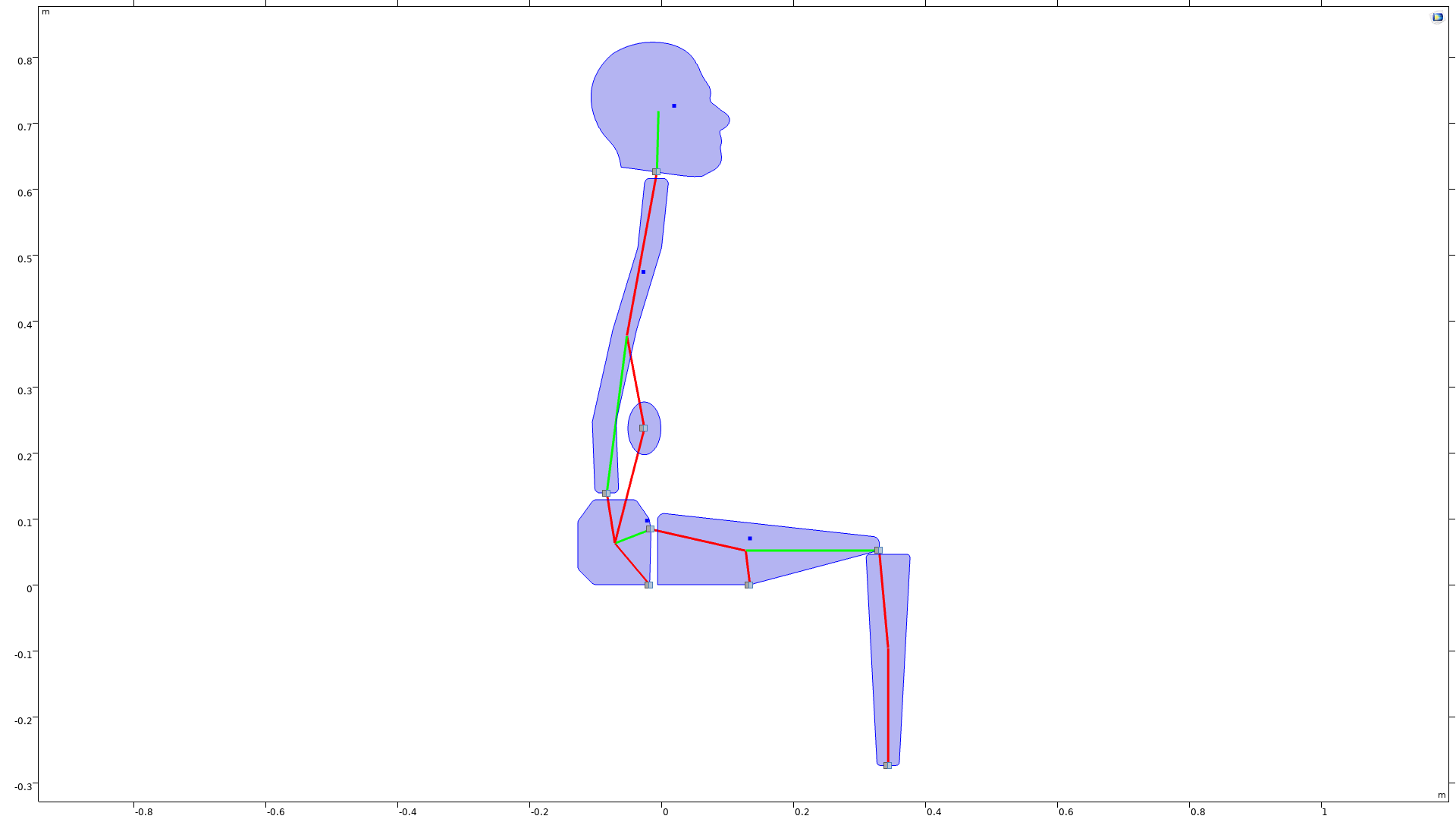
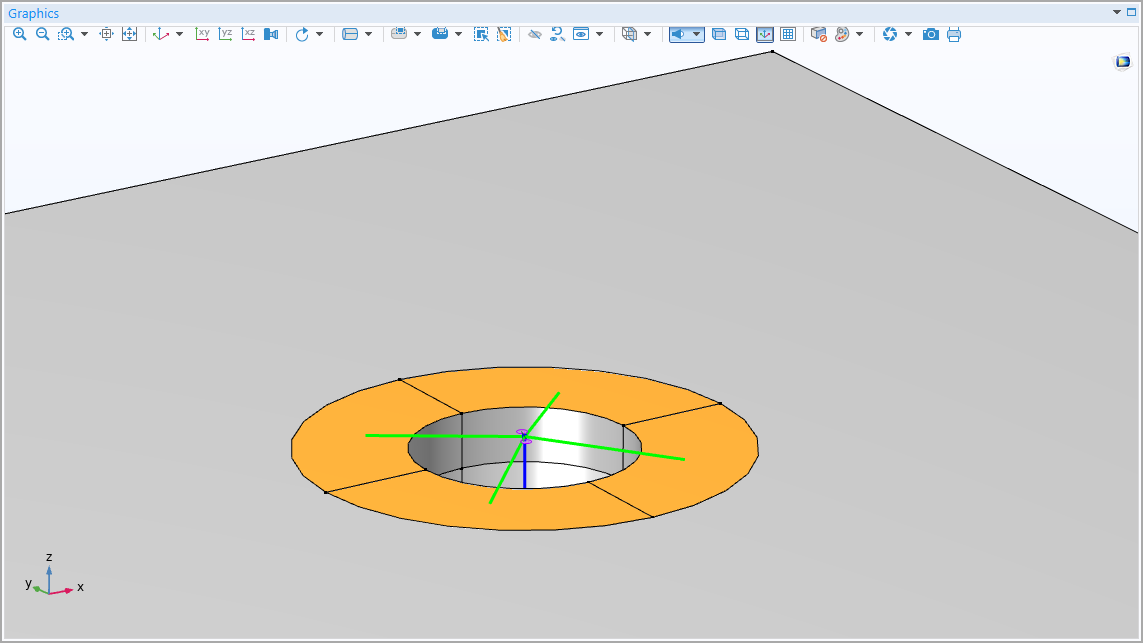
Springs and Dampers Connecting Points
In all structural mechanics interfaces, a new feature called Spring-Damper has been added to connect two points with a spring and/or damper. The points can be geometrical points, but they can also be abstract, for example, through the use of attachments or direct connections to rigid bodies. The spring can either be physical, with a force acting along the line between the two points, or described by a full matrix, connecting all translational and rotational degrees of freedom in the two points. The feature also makes it possible to connect a spring between points in two different physics interfaces.
{kind=link}
Rigid Connector Improvements
The Rigid Connector features have multiple improvements. In the Shell and Beam interfaces, the selection alternatives have been extended to the top level, that is, boundaries and edges, respectively. When the center of rotation is defined by a point selection, the point no longer has to be part of the physics interface itself. You can couple rigid connectors from different physics interfaces, thus defining a new type of virtual rigid object (this selection resides in the Advanced section of the settings for the rigid connector). In the Solid Mechanics, Shell, and Beam interfaces, you can automatically generate rigid connectors from RBE2 elements in an imported file in the NASTRAN® format. This is controlled from a section named Automatic Modeling in the settings for these interfaces. Rigid connectors can belong to several physics interfaces, in order to mimic the connections in the imported file.
Friction with a Known Sliding Velocity
In some applications, the direction of the friction force is known, because two objects are sliding on each other with a given relative velocity. In this case, it is not necessary to solve for the friction forces, which can significantly speed up the solution. The new Slip Velocity feature, added as a subnode under the Contact node, can be used for these cases. The inputs for this node are similar to those of the Friction node. You can see this new feature in the new Disc Brake Pad Wear model.
New Option for Prescribing Rotating Frame Speed
In the Rotating Frame node in the Solid Mechanics and Multibody Dynamics interfaces, a new Rigid body option has been added. With this option, you enter a time-dependent torque around the axis of rotation, and the rotational velocity is computed by integration of the rigid body equation of motion.
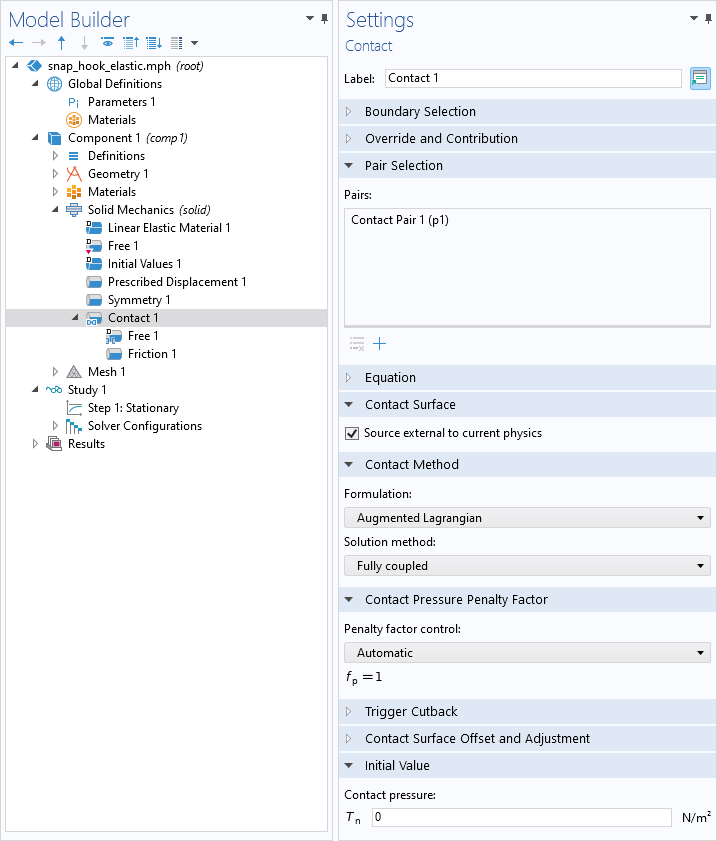
Contact Improvements
In addition to the new dynamic contact and wear functionality, there are several other improvements in the field of contact mechanics. You can use a fully coupled solver together with the augmented Lagrangian contact algorithm, making it easier to set up solver sequences and improving stability and convergence for some problems. Also, in the Friction subnode under Contact, you can select User defined as the Friction model to directly enter an expression for the tangential force that causes sliding in terms of any other variables. Lastly, there are several new ways of providing penalty factors, both for the penalty method and for the augmented Lagrangian method.
{kind=link}
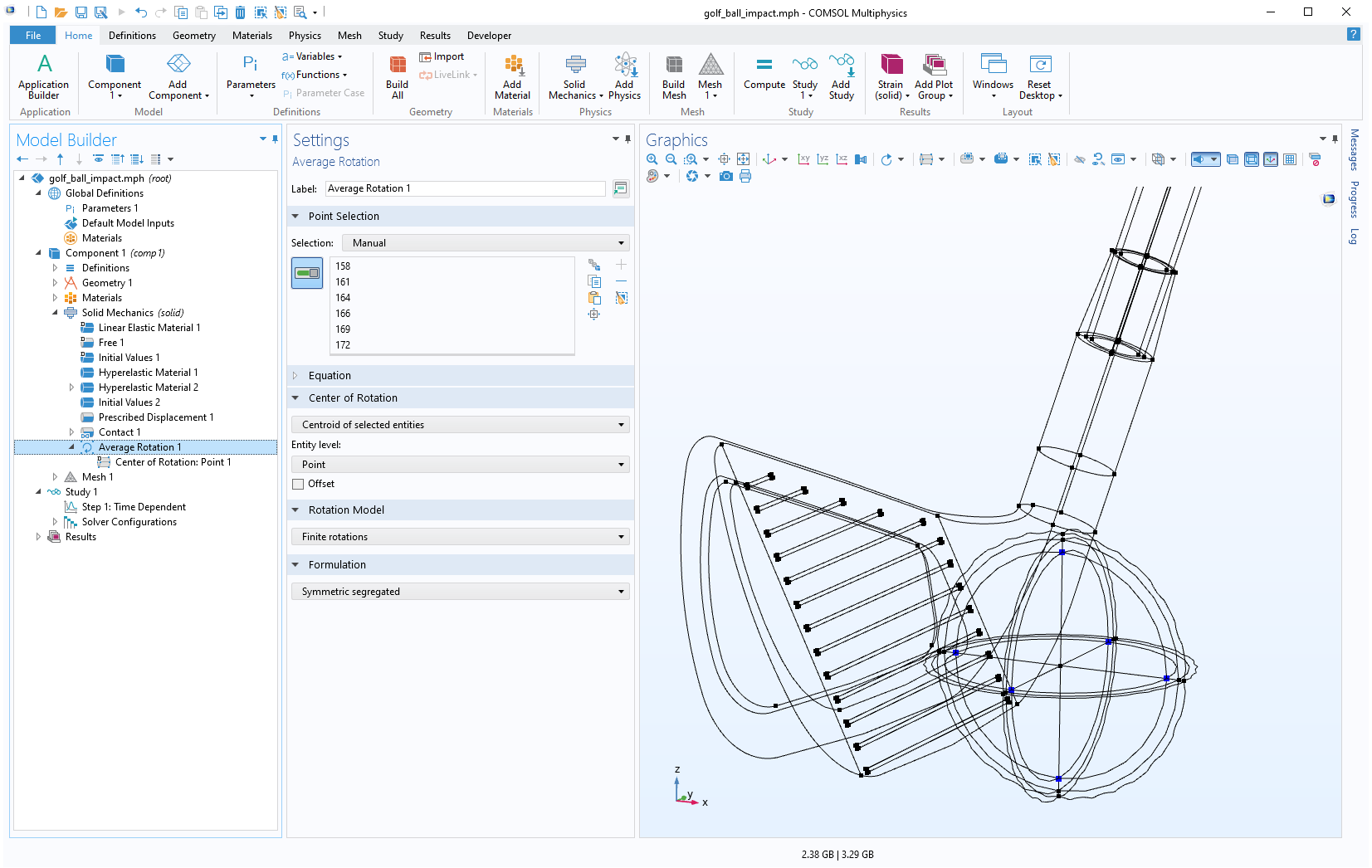
Computing Rotation from Displacements
In physics interfaces that have displacements as degrees of freedom, it is sometimes necessary to study the rotation of a region. To do that, you can add the new Average Rotation node, which uses the displacements of a set of points to generate variables representing the rotation. If more than three points are given, a least squares scheme is applied to make the best approximation of a rigid body rotation for the entire set of points. Additionally, angular velocities and accelerations can be computed. You can view this new feature in the new Impact Analysis of a Golf Ball and updated Sensitivity Analysis of a Truss Tower tutorial models.
New Tutorial Models
COMSOL Multiphysics® version 5.6 brings three new tutorial models to the Multibody Dynamics Module.
Dynamics of a Cylindrical Roller Bearing
Application Library Title:
roller_bearing_dynamics
Slider Crank Mechanism with Joint Clearance
Application Library Title:
slider_crank_mechanism_with_clearance
Modeling of Vibration and Noise in a Gearbox: Bearing Version
Application Library Title:
gearbox_vibration_noise_bearing