
In vielen Features der COMSOL Multiphysics® Software haben Sie die Möglichkeit, eine schwache Nebenbedingung zu verwenden. In diesem Blog-Beitrag werden wir uns näher damit befassen, was eine schwache Nebenbedingung ist, warum Sie sie verwenden sollten und welche besonderen Überlegungen Sie bei ihrer Verwendung anstellen müssen.
Inhalt
- Wie Sie schwache Nebenbedingungen in COMSOL Multiphysics® implementieren
- Lagrange-Multiplikatoren
- Behandlung von Finite-Elemente-Nebenbedingungen
- Einführung der Lagrange-Multiplikatoren
- Schwache Nebenbedingungen
- Nitsche-Nebenbedingungen
- Ein Hinweis zur Terminologie
- Interpretation von Lagrange-Multiplikatoren
- Was Sie bei der Verwendung schwacher Nebenbedingungen beachten sollten
Wie Sie schwache Nebenbedingungen in COMSOL Multiphysics® implementieren
Der Standardtyp für Nebenbedingungen in COMSOL Multiphysics® ist in fast allen Fällen eine punktweise Nebenbedingung. Eine punktweise Nebenbedingung wird direkt auf einen Freiheitsgrad angewendet, typischerweise auf eine Gruppe von Knoten im Netz.
In den Einstellungen für die meisten Standard-Features im Model Builder gibt es einen Abschnitt namens Constraint Settings. In diesem Abschnitt können Sie zwischen verschiedenen Bedingungsformulierungen wählen. Bei einigen Features enthält die Liste möglicherweise eine dritte Option Nitsche.
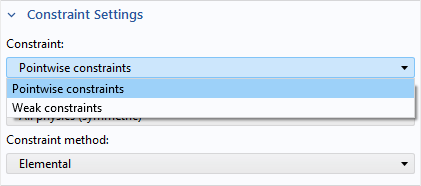
Ein Beispiel für den Abschnitt Constraint Settings.
Dieser Abschnitt wird jedoch standardmäßig nicht angezeigt. Schwache Nebenbedingungen gehören zu den Features, die als „erweitert“ gelten. Sie können diesen Abschnitt aktivieren, indem Sie im Dialogfeld Show More Options die Option Advanced Physics Options auswählen.
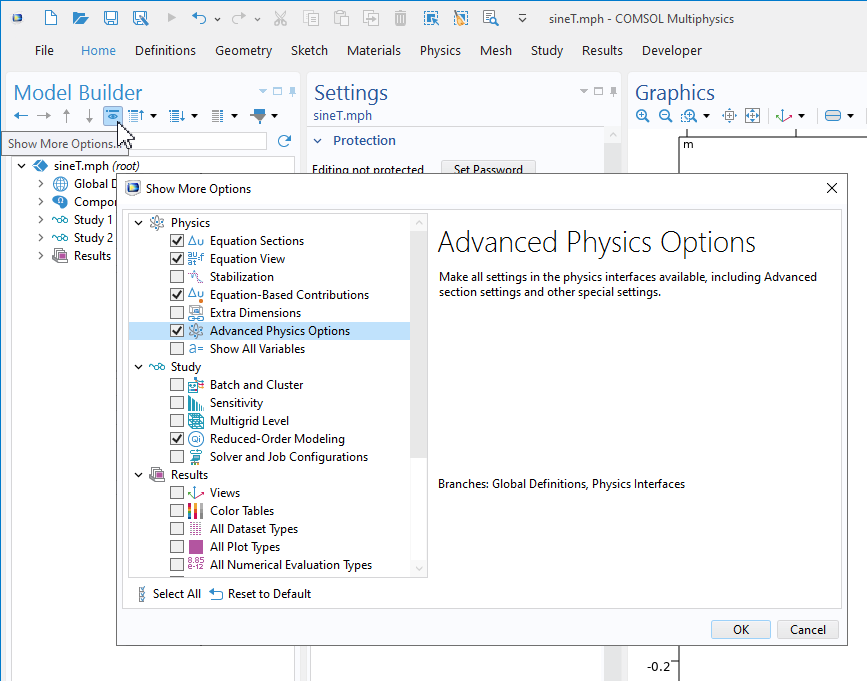 Aktivieren der Advanced Physics Options.
Aktivieren der Advanced Physics Options.
Lagrange-Multiplikatoren
Da schwache Nebenbedingungen auf Lagrange-Multiplikatoren basieren, erscheint es sinnvoll, zunächst einige allgemeine Informationen zu diesem Thema zu geben.
Das Konzept der Lagrange-Multiplikatoren wurde von Mathematiker Joseph-Louis Lagrange im Rahmen seiner Arbeiten zur Variationsrechnung eingeführt. Erfahren Sie mehr über sein Leben und Werk in unserem Blog-Beitrag “Happy Birthday, Joseph-Louis Lagrange”.
Ein allgemeines Problem der beschränkten Minimierung lässt sich wie folgt formulieren: Finden Sie das Minimum einer Funktion f(\mathbf x) \;\text{for} \; \mathbf x \in \Omega, unter Berücksichtigung einer Reihe von Beschränkungen g_i(\mathbf x) = 0. Das Problem besteht dann darin, wie die Beschränkungen allgemein erfüllt werden können. Bei trivialen Nebenbedingungen (z. B. linearen Nebenbedingungen) kann es möglich sein, die Nebenbedingungen explizit zu invertieren und das Ergebnis in f(\mathbf x) einzusetzen, wodurch sich die Anzahl der Unbekannten reduziert. Dies ist jedoch eher die Ausnahme als die Regel.
Die Idee ist nun, dass Sie stattdessen das Minimum für
finden. Dabei ist \lambda_i eine Menge neuer unbekannter Variablen, die Lagrange-Multiplikatoren. Da g_i(\mathbf x) = 0 für die wahre Lösung gilt, ist es offensichtlich, dass der Minimalwert von \mathcal{L} dem beschränkten Minimum von f entspricht. Aber warum funktioniert das?
Um die Extremwerte einer Funktion zu ermitteln, müssen Sie die partiellen Ableitungen nach allen Variablen berechnen und auf Null setzen. In diesem Fall
und
Somit werden die Nebenbedingungen durch Differenzieren nach den Lagrange-Multiplikatoren wiederhergestellt, was bedeutet, dass die Nebenbedingungen aktiv bleiben. Die erste Gleichungsgruppe ist jedoch etwas komplexer. Um zu verstehen, warum sie für bestimmte Werte von \lambda_i ein korrektes Minimum gewährleisten, ist eine detailliertere Argumentation erforderlich. Bemerkenswert ist, dass die neuen Gleichungen nun auch die Gradienten der Nebenbedingungen enthalten.
Eine ausführliche Erklärung mit anschaulichen Beispielen finden Sie unter: “Lagrange multiplier”.
Behandlung von Finite-Elemente-Nebenbedingungen
Betrachten wir ein einfaches lineares statisches Finite-Elemente-Problem. In der endgültigen diskretisierten Matrixform kann es wie folgt geschrieben werden:
wobei \mathbf{K} die Steifigkeitsmatrix, \mathbf {u} der Vektor der Freiheitsgrade und \mathbf {f} der Vektor der Knotenlasten ist. Um dieses System lösen zu können (die Steifigkeitsmatrix singulär zu machen), muss eine Mindestanzahl von Freiheitsgraden bekannt sein. Für ein Wärmetransportproblem ist mindestens eine Temperatur erforderlich, während für ein Festkörpermechanikproblem in 3D mindestens 6 Verschiebungsfreiheitsgrade bekannt sein müssen. Meistens werden solche Werte durch direkte Eingabe dieser Freiheitsgrade angegeben. Es gibt auch andere Optionen, wie z. B. eine Konvektionsrandbedingung in der Wärmetransportanalyse oder Federbedingungen für die Strukturmechanik.
Häufig werden weitaus mehr Nebenbedingungen als für die Stabilität erforderlich angewendet, beispielsweise über einen gesamten Rand hinweg. Solange einige Freiheitsgrade durch Nebenbedingungen eingeschränkt sind, kann das Gleichungssystem formal wie folgt aufgeteilt werden:
Hier bezeichnet der Index „a“ einen aktiven Freiheitsgrad und der Index „c“ einen eingeschränkten Freiheitsgrad. Der Vektor \mathbf {r} enthält die noch unbekannten Reaktionen an den eingeschränkten Knoten. Diese Terminologie stammt aus der Festkörpermechanik, wo es naheliegend ist, von Reaktionskräften zu sprechen. Beim Wärmetransport beispielsweise ist die Reaktion ein Wärmefluss. In den meisten Fällen werden an eingeschränkten Knoten keine Lasten \mathbf f_{\mathrm{c}} aufgebracht, da sie keinen Einfluss auf die Lösung haben.
Die Werte von \mathbf u_{\mathrm{c}} sind bekannt, beispielsweise \mathbf u_{\mathrm{c}}= \mathbf u_0. Die grundlegendste Methode, dies bei der Lösung der Finite-Elemente-Gleichungen zu handhaben, besteht darin, nur die aktiven Freiheitsgrade zu lösen. Die Auswirkungen der vorgegebenen Werte können auf die rechte Seite verschoben werden, sodass
Nachdem das reduzierte Gleichungssystem gelöst wurde, können die Reaktionen in einem Auswertungsschritt berechnet werden:
In der Praxis muss lediglich die Matrix \mathbf k_{\mathrm{aa}} zusammengesetzt werden. Die anderen Vorwärtsmultiplikationen können auf Elementebene effizienter verarbeitet werden.
Diese Art der Darstellung der Reaktionskräfte geht von einem linearen Problem aus, sodass die Matrizen konstant sind. Eine allgemeinere Formulierung lautet, dass die Reaktionskräfte das Ergebnis der Berechnung von Residuen sind. Bei aktiven Freiheitsgraden sind die Residuen für eine konvergierte Lösung klein. An eingeschränkten Knoten sind die Residuen größer und können als Reaktionskräfte interpretiert werden.
Die Berechnung der Knotenreaktionen a posteriori ist im Wesentlichen das, was Sie mit dem Operator reacf() in COMSOL Multiphysics® tun können. Beachten Sie, dass die erhaltenen Werte konzentrierte Knotenwerte sind. Es handelt sich nicht um ein verteiltes Feld. Abhängig von den im Element verwendeten Formfunktionen können solche Knotenwerte eine recht unintuitive Verteilung aufweisen. Die Summe ist bis auf die numerische Rundungsgenauigkeit exakt.
Ein Nachteil dieses Ansatzes ist, dass die Reaktionen innerhalb der Berechnungen nicht verfügbar sind, falls Sie diese verwenden müssen.
Hinweis: Die obige Beschreibung basiert auf Finite-Elemente-Formulierungen im Allgemeinen und stellt eine starke Vereinfachung dessen dar, was tatsächlich in COMSOL Multiphysics® geschieht. Die Behandlung von Nebenbedingungen ist wesentlich komplexer. Beispielsweise können Nebenbedingungen nichtlinear sein oder verschiedene Variablen miteinander verbinden, sogar solche, die unterschiedliche Physikbereiche repräsentieren.
Einführung der Lagrange-Multiplikatoren
Wir bleiben vorerst bei der diskretisierten Form und betrachten ein weniger abstraktes Beispiel aus der Festkörpermechanik. Für ein lineares Problem lässt sich zeigen, dass die potenzielle Energie
ist. Durch Minimierung von W in Bezug auf die Verschiebungen erhalten wir wieder den zuvor verwendeten gewöhnlichen Gleichungssatz. Erweitern wir nun das Potential, indem wir alle Nebenbedingungen mit einzelnen Lagrange-Multiplikatoren multiplizieren:
Zur Verdeutlichung wird der Vektor der Freiheitsgrade in uneingeschränkte (\mathbf u_{\mathrm{a}}) und eingeschränkte (\mathbf u_{\mathrm{c}}) Freiheitsgrade unterteilt. Es ist wichtig zu beachten, dass in dieser neuen Formulierung die eingeschränkten Freiheitsgrade als unbekannt betrachtet werden. Dies ist ein grundlegender Unterschied zum vorherigen Ansatz.
Der Einfachheit halber wurde angenommen, dass keine Lasten auf die eingeschränkten Freiheitsgrade wirken. Durch Differenzieren nach jedem Satz von Freiheitsgraden erhält man nun das folgende Gleichungssystem:
Anhand der zweiten Gleichungsreihe lässt sich leicht überprüfen, dass die Lagrange-Multiplikatoren mit dem oben eingeführten Knotenreaktionsvektor \mathbf {r} identisch sind. Die letzte Gleichungsreihe besagt lediglich, dass \mathbf u_{\mathrm{c}} = \mathbf u_0 gilt.
Wenn die ursprüngliche Steifigkeitsmatrix symmetrisch ist (was häufig der Fall ist), ist dieses neue Gleichungssystem ebenfalls symmetrisch. Diese Formulierung hat jedoch einige Nachteile:
- Anstatt nur die aktiven Freiheitsgrade zu berechnen, erfordert diese Formulierung die Berechnung der aktiven Freiheitsgrade, der eingeschränkten Freiheitsgrade und der Lagrange-Multiplikatoren.
- Auf der Diagonalen befinden sich Nullen. Nicht alle Methoden zur Lösung linearer Gleichungssysteme können damit umgehen.
- Aus numerischen Gründen ist es wichtig, die Gleichungen richtig zu skalieren. Die ursprünglichen Einträge der Steifigkeitsmatrix können sehr weit von Eins entfernt sein.
Angesichts dieser Nachteile stellt sich die Frage, warum eine solche Formulierung vorteilhaft sein sollte. Hier sind einige Gründe:
- Die Werte der Reaktionen sind eigentlich Teil der Problemstellung. Es reicht also nicht aus, sie als Ergebnisgröße zu betrachten.
- Stark nichtlineare Nebenbedingungen konvergieren in der Regel besser, wenn sie unter Verwendung von Lagrange-Multiplikatoren formuliert werden.
- Zeitableitungen können nicht in punktweisen Nebenbedingungen verwendet werden. Wenn Sie diese benötigen, ist die Verwendung von Lagrange-Multiplikatoren die einzige Option.
Schwache Nebenbedingungen
Schwache Nebenbedingungen basieren auf dem gleichen Konzept der Lagrange-Multiplikatoren. Allerdings werden die Nebenbedingungen bereits in der mathematischen Beschreibung vor der Diskretisierung berücksichtigt.
Die Finite-Elemente-Formulierung basiert auf der Verwendung der schwachen Form der zugrunde liegenden Gleichungen. In der Festkörpermechanik ist dies auch als Prinzip der virtuellen Arbeit bekannt. Die Formulierung lautet wie folgt:
Hier ist \sigma der Spannungstensor, \varepsilon der Dehnungstensor, \mathbf {t} der Traktionsvektor und \mathbf {u} das Verschiebungsfeld. Das Symbol \delta bezeichnet einen Variationsoperator. In COMSOL Multiphysics® wird er durch die Operatoren test() und var() dargestellt. Es gilt die im Programm verwendete Vorzeichenkonvention.
Der Einfachheit halber wird angenommen, dass die Lasten (Zugkräfte) nur an den Rändern wirken. In einer allgemeineren Umgebung können auch Volumen-, Kanten- und Punktlasten auftreten.
Um die Formulierung zu vervollständigen, werden für einen Teil der Ränder vorgegebene Werte für die Verschiebungen festgelegt:
Bei der Näherung der Verschiebungen mit ausgewählten Formfunktionen wird dieser mathematische Ausdruck in die diskretisierte Form der Finite-Elemente-Gleichungen umgewandelt.
Mithilfe der Idee der Lagrange-Multiplikatoren können die Nebenbedingungen nun durch Hinzufügen eines zusätzlichen Terms in den schwachen Ausdruck integriert werden:
Hier ist \lambda(\mathbf x) ein Lagrange-Multiplikatorfeld, das über den eingeschränkten Rand definiert ist. Unter der Annahme, dass \mathbf u_0 lediglich ein vorgegebener Wert ist (unabhängig von der Lösung), kann der letzte Term in drei Terme erweitert werden, sodass
Wenn der Ausdruck der schwachen Form mithilfe der Finite-Elemente-Methode in diskretisierte Gleichungen umgewandelt wird, wird \lambda(\mathbf x) ebenso wie die Verschiebungen mithilfe von Formfunktionen über dem Element approximiert. Grundsätzlich könnten die Formfunktionen für die beiden Felder unabhängig voneinander ausgewählt werden, jedoch würde dann die Symmetrie der Steifigkeitsmatrix verloren gehen (und die Matrix könnte sogar singulär werden). Daher werden in der Regel dieselben Formfunktionen wie für die Verschiebungen verwendet. Nach der Zusammenstellung sieht das Gleichungssystem wie folgt aus:
Die Matrizen \mathbf L und \mathbf L^T stammen aus dem dritten und vierten Term des obigen schwachen Ausdrucks, die eine Symmetrieeigenschaft aufweisen, solange für Verschiebungen und Lagrange-Multiplikatoren dieselben Formfunktionen verwendet werden.
Ergänzende Anmerkung: Die Matrix \mathbf L ist tatsächlich identisch mit dem Beitrag der Massenmatrix, den Sie bei einer Verteilung der Einheitsmasse pro Fläche auf demselben Rand erhalten würden. In dem Interface Solids Mechanics kann eine solche Massenverteilung über den Knoten Added Mass angegeben werden.
Zum Vergleich noch einmal das Gleichungssystem, das sich bei Anwendung der Lagrange-Multiplikatoren auf das diskretisierte System ergibt:
Wie zu sehen ist, ist die Struktur ähnlich, jedoch wurden die Einheitsmatrizen durch \mathbf L ersetzt, und die rechte Seite enthält nun \tilde {\mathbf u}_0, eine gewichtete Form von \mathbf u_0.
Was bewirkt diese Änderung? Nun, die Knotenwerte der vorgegebenen Freiheitsgrade entsprechen nicht mehr genau den vorgegebenen Werten. Andererseits liegen die Werte zwischen den Knoten im Durchschnitt näher an der vorgegebenen Funktion \mathbf u_{0}(\mathbf x).
Zur Veranschaulichung betrachten wir ein einfaches Beispiel aus dem Wärmetransport, bei dem die Ergebnisse der Standardmethode mit punktweisen Nebenbedingungen und der Methode mit schwachen Nebenbedingungen verglichen werden.
Beispiel 1: Wärmetransport
Ein 2D-Wärmetransport-Problem wird auf dem Einheitsquadrat mit einem 2×2-Netz unter Verwendung von Lagrange-Elementen zweiter Ordnung gelöst. Am rechten Rand wird die Temperatur als sin(2*Y) vorgegeben. Am gegenüberliegenden Rand wird die Temperatur auf Null gesetzt. An den übrigen Rändern gibt es keine Randbedingungen, was keinem Fluss entspricht. Die vorgegebene Temperatur wird so gewählt, dass sie nicht exakt durch die quadratischen Formfunktionen beschrieben werden kann.
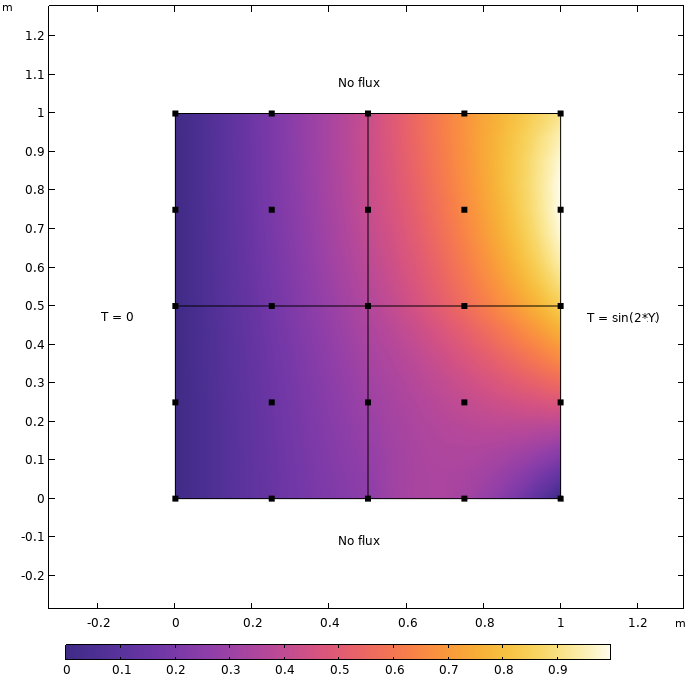 Das Modell mit den Randbedingungen und einem berechneten Temperaturfeld.
Das Modell mit den Randbedingungen und einem berechneten Temperaturfeld.
Wenn wir die Temperatur entlang der rechten Kante plotten, ist der Unterschied zwischen den beiden Methoden kaum sichtbar, wie in der Abbildung unten zu sehen ist.
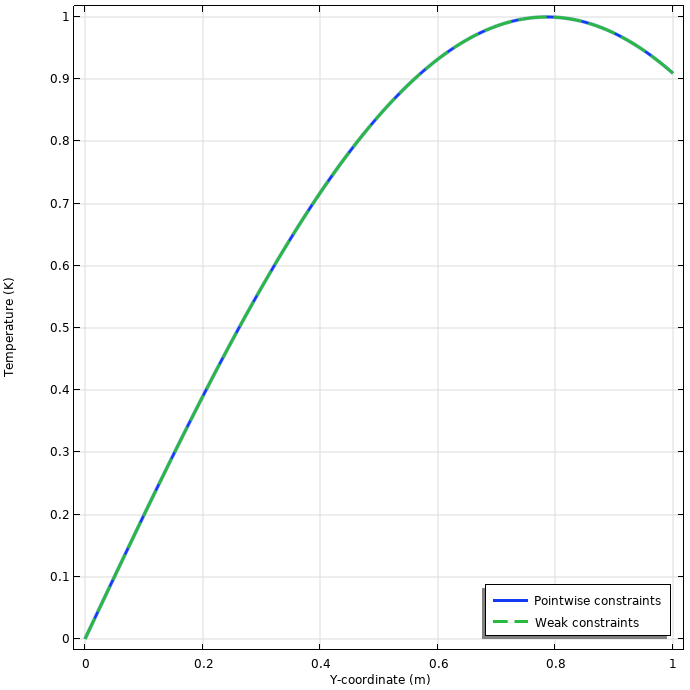 Die Temperaturverteilung entlang der rechten Kante.
Die Temperaturverteilung entlang der rechten Kante.
In der folgenden Abbildung sehen wir einen Vergleich zwischen der Temperatur und ihrem Sollwert, der einen interessanteren Plot ergibt.
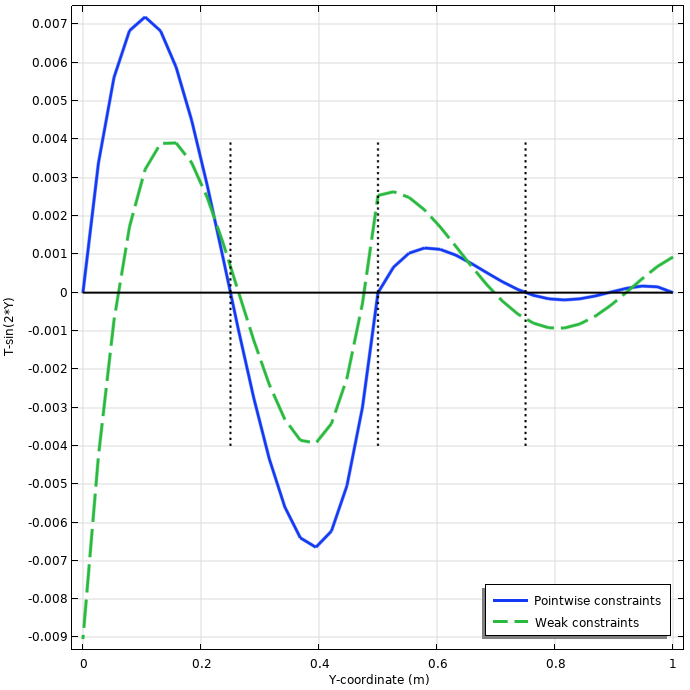 Ein Plot der Differenz zwischen dem tatsächlichen Temperaturfeld und der vorgegebenen Temperatur. Die Positionen der Knotenpunkte sind durch gestrichelte vertikale Linien gekennzeichnet.
Ein Plot der Differenz zwischen dem tatsächlichen Temperaturfeld und der vorgegebenen Temperatur. Die Positionen der Knotenpunkte sind durch gestrichelte vertikale Linien gekennzeichnet.
Hier ist zu erkennen, dass die punktweisen Nebenbedingungen genau mit der gegebenen Funktion an den Knotenpunkten übereinstimmen. Bei Verwendung schwacher Nebenbedingungen ist dies nicht der Fall.
Ist die eine oder die andere Lösung besser? Ein erster Ansatz könnte darin bestehen, den durchschnittlichen Fehler im Vergleich zur gegebenen Funktion zu berechnen. Das Ergebnis ist in der folgenden Tabelle aufgeführt.
| Nebenbedingung | Mittelwert von T-sin(2*Y) |
|---|---|
| Punktweise Nebenbedingung | 2.5*10-4 |
| Schwache Nebenbedingung | 3.6*10-7 |
Es zeigt sich, dass der mittlere Fehler bei Verwendung der schwachen Nebenbedingungen um drei Größenordnungen kleiner ist. Durch Hinzufügen des Lagrange-Multiplikatorfeldes wird der vorgegebene Wert im Durchschnitt bestmöglich erreicht. Um sicherzustellen, dass es sich hierbei nicht um einen glücklichen Zufall handelt, wird ein parametrischer Sweep durchgeführt, bei dem die Dichte des Netzes entlang der Kante von 1 auf 20 Elemente geändert wird.
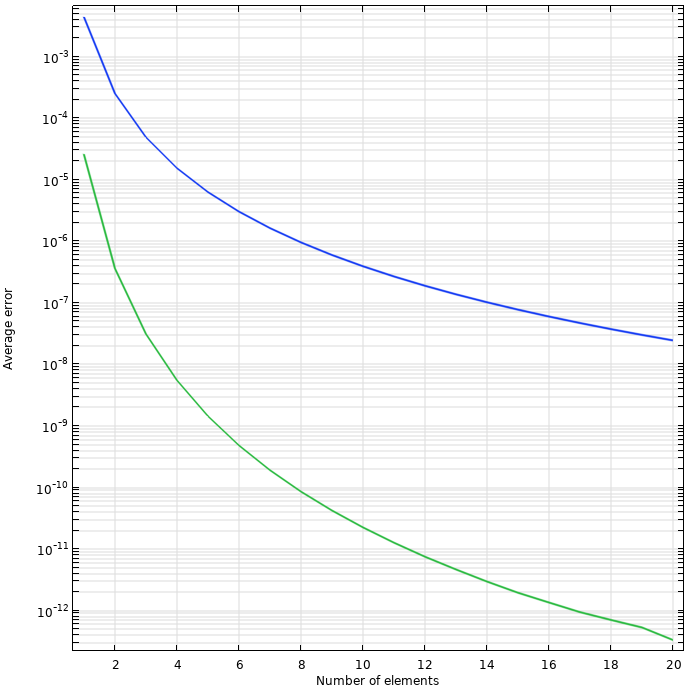 Der durchschnittliche Temperaturfehler entlang der rechten Kante als Funktion der Netzdichte.
Der durchschnittliche Temperaturfehler entlang der rechten Kante als Funktion der Netzdichte.
Es sollte nicht vergessen werden, dass diese Fehler sehr gering sind. Bei jedem ausreichend feinen Netz sind diese Vergleiche nur aus theoretischer Sicht interessant.
Im nächsten Beispiel werden die Auswirkungen des ausgewählten Nebenbedingungstyps direkt sichtbar.
Beispiel 2: Balkenmodell
In diesem Beispiel arbeiten wir mit einem Balken mit quadratischem Querschnitt, der einer einachsigen Zugspannung ausgesetzt ist. Es handelt sich um eine Baugruppe mit zwei Gebieten. Ein Gebiet ist mit hexaedrischen Elementen vernetzt, der andere mit tetraedrischen Elementen. Da es sich um eine Baugruppe handelt, werden die beiden Gebiete mithilfe einer Kontinuitätsbedingung verbunden. Dies hat zur Folge, dass das Netz an dem gemeinsamen Rand nicht konform ist.
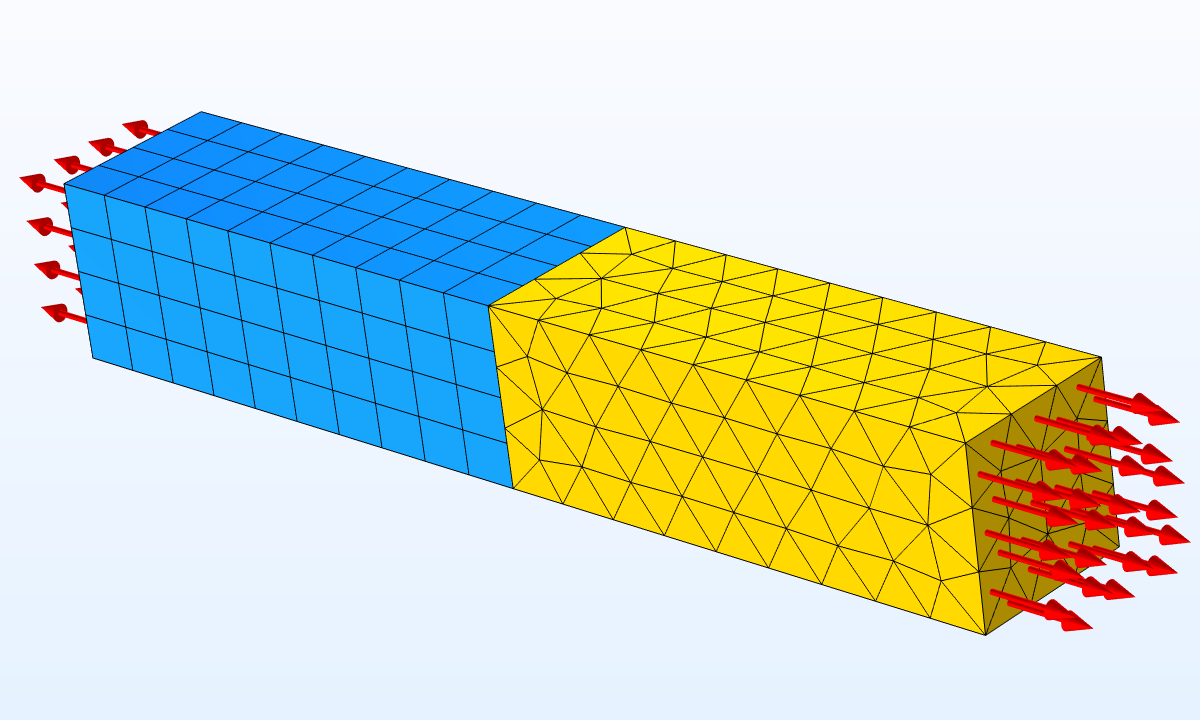 Das Netz und die Belastung des Balkenmodells.
Das Netz und die Belastung des Balkenmodells.
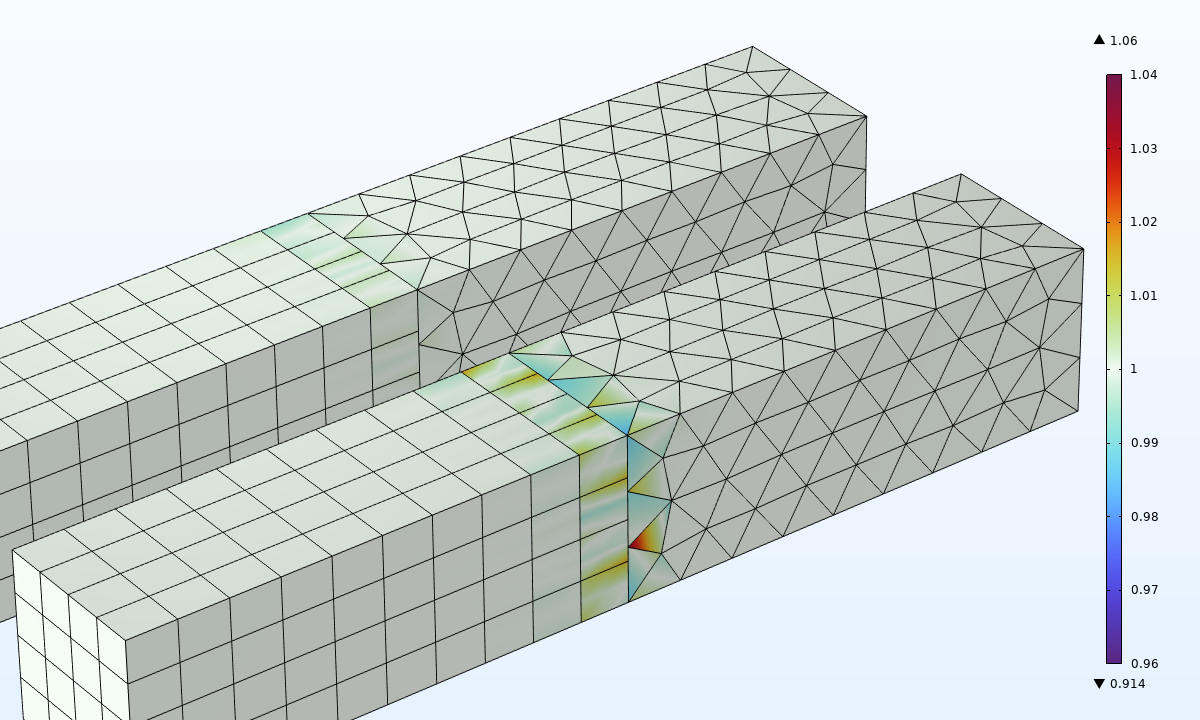
In der Standardeinstellung wird die Kontinuität mithilfe von punktweisen Nebenbedingungen durchgesetzt, sodass jeder Knoten auf der Zielseite genau dieselbe Verschiebung aufweisen muss, wie an der entsprechenden Stelle auf der Quellseite. Je nachdem, welche Seite als Ziel ausgewählt wird, werden unterschiedliche Ergebnisse erzielt.
 Spannungsverteilung im Balken bei Verwendung punktweiser Nebenbedingungen. Im Vordergrund bilden die hexaedrischen Elemente die Zielseite, im Hintergrund sind es die tetraedrischen Elemente.
Spannungsverteilung im Balken bei Verwendung punktweiser Nebenbedingungen. Im Vordergrund bilden die hexaedrischen Elemente die Zielseite, im Hintergrund sind es die tetraedrischen Elemente.
Aufgrund der nicht-konformen Formfunktionen an der Grenzfläche zwischen den beiden Gebieten kommt es zu erheblichen lokalen Störungen im Spannungsfeld. Die Störungen klingen mit zunehmendem Abstand von der Verbindung schnell ab. Dieses Phänomen wird in unserem Blog-Beitrag “Anwendung und Interpretation des Saint-Venant-Prinzips”. näher erläutert.
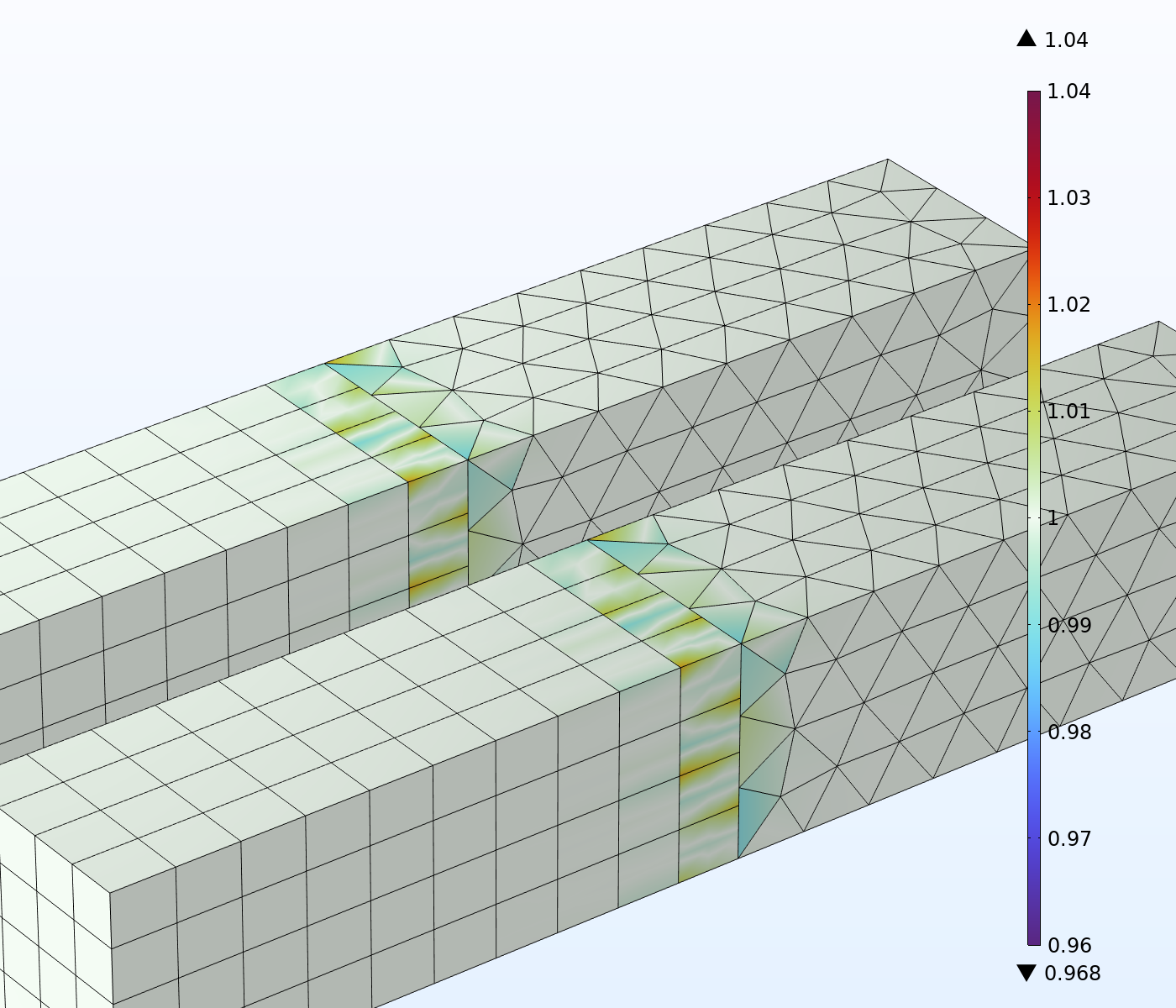
Wenn wir nun zu schwachen Nebenbedingungen übergehen, sind die Ergebnisse deutlich besser. Im folgenden Plot wurde für die Spannung eine andere Skala verwendet. Die Fehler sind um etwa eine Größenordnung kleiner.
 Spannungsverteilung im Balken bei Verwendung schwacher Nebenbedingungen.
Spannungsverteilung im Balken bei Verwendung schwacher Nebenbedingungen.
Dies lässt die Schlussfolgerung zu, dass schwache Nebenbedingungen ein effizientes Mittel zur Verringerung von Spannungsstörungen beim Verbinden nicht übereinstimmender Netze darstellen können.
Sie fragen sich möglicherweise, warum die Unterschiede zwischen den Formulierungen in diesem Fall so groß sind, obwohl der Effekt im Wärmetransportbeispiel so gering war. Die Antwort lautet, dass die vorgeschriebene Temperatur gleichmäßig ist und durch die Formfunktionen relativ gut approximiert werden kann. Bei einem nicht übereinstimmenden Netz wird das Verschiebungsfeld auf jeder Elementfläche durch eigene Formfunktionen dargestellt und weist keine kontinuierlichen Ableitungen auf. Dadurch wird der Mittelungseffekt der schwachen Nebenbedingung wesentlich wichtiger.
Nitsche-Nebenbedingungen
Einige Features in COMSOL Multiphysics® ermöglichen eine dritte Art der Implementierung von Nebenbedingungen: die Nitsche-Methode. Wir werden hier nicht näher auf die Theorie eingehen. Es handelt sich ebenfalls um eine schwache Nebenbedingung, die jedoch nicht auf Lagrange-Multiplikatoren basiert. Es werden keine zusätzlichen Freiheitsgrade hinzugefügt. Nachfolgend sind die Ergebnisse aufgeführt, die sich bei Anwendung der Methode auf dasselbe Anwendungsbeispiel ergeben.
 Spannungsverteilung im Balken bei Verwendung von Nitsche-Nebenbedingungen.
Spannungsverteilung im Balken bei Verwendung von Nitsche-Nebenbedingungen.
Es stehen mehrere Varianten der Nitsche-Methode zur Auswahl. Hier wird die standardmäßige symmetrische Methode verwendet. Wie zu sehen ist, spielt die Wahl von Quelle und Ziel keine Rolle mehr, und der Fehler ist sogar noch geringer als bei Verwendung der schwachen Nebenbedingungen. Die Nitsche-Nebenbedingung betrifft nicht nur die Knoten auf dem verbundenen Rand, sondern auch alle Knoten, die mit einem Element verbunden sind, das eine Fläche auf diesem Rand hat, wodurch ein zusätzliches Maß an Flexibilität geboten wird.
Der Nachteil der Nitsche-Methode besteht darin, dass sie in ihrer Standardimplementierung (die auch die stabilste ist) zu einer unsymmetrischen Steifigkeitsmatrix führt, was zu deutlich längeren Lösungszeiten führen kann. Wenn es andere Effekte im Problem gibt, die zu unsymmetrischen Beiträgen führen, stellt dies kein Problem dar, da die Vorteile einer symmetrischen Steifigkeitsmatrix bereits verloren gegangen sind.
Ein Hinweis zur Terminologie
Wenn Sie in COMSOL Multiphysics® die Option „“Weak Constraints“ auswählen, bedeutet dies, dass Lagrange-Multiplikatoren verwendet werden. In einigen Fällen, beispielsweise bei der Beschränkung einzelner Punkte oder Freiheitsgrade gewöhnlicher Differentialgleichungen (ODE), ist der Lagrange-Multiplikator lediglich eine Zahl und kein Feld. In solchen Fällen entspricht die Situation der oben für den diskreten Fall beschriebenen. Es gibt keine neuen Näherungen; der einzige Effekt besteht darin, dass Sie direkten Zugriff auf die Kräfte erhalten. (Allerdings können Sie dies möglicherweise nicht als echte schwache Nebenbedingung betrachten.)
Es gibt auch einige Fälle, insbesondere in den Interfaces für Strukturmechanik, in denen eine Formulierung mit Lagrange-Multiplikatoren verwendet wird, ohne ausdrücklich auf schwache Nebenbedingungen Bezug zu nehmen. Beispielsweise verfügt das Feature Rigid Connector über eine Option Evaluate reaction forces.
Sie fragen sich vielleicht, warum Sie eine Option zum Ermitteln der Reaktionskräfte benötigen. Der Grund dafür ist, dass es für diese und ähnliche Features keine andere Möglichkeit gibt, die Reaktionskräfte zu berechnen, als Lagrange-Multiplikatoren zu verwenden. Andererseits kann die konsequente Verwendung einer solchen Formulierung möglicherweise zu schwer nachvollziehbaren Problemen führen, wie wir später noch erläutern werden. Daher ist eine Angabe des Nutzers erforderlich.
Interpretation von Lagrange-Multiplikatoren
Es wurde oben erwähnt, dass im diskreten Fall die Lagrange-Multiplikatoren direkt als Knotenreaktionskräfte interpretiert werden können. Diese Eigenschaft ist wesentlich allgemeiner und nicht auf Finite-Elemente-Methoden oder Festkörpermechanik beschränkt. Die Lagrange-Multiplikatoren repräsentieren eine Aktion, die erforderlich ist, um die Beschränkung durchzusetzen. Oft, aber nicht immer, repräsentiert der Lagrange \mathcal {L } eine Energie. In einem solchen Fall sind die Lagrange-Multiplikatoren energetisch konjugiert zur beschränkten Größe.
Die tatsächliche Einheit des Lagrange-Multiplikators hängt auch von der Dimensionalität des Objekts ab, das beschränkt wird. Bei der Festkörpermechanik hat ein Rand, der mit schwachen Nebenbedingungen beschränkt ist, Lagrange-Multiplikatoren mit der Einheit N/m² = Pa. Das Lagrange-Multiplikatorfeld kann dann als das Traktionsfeld interpretiert werden, das auf den Rand angewendet werden muss, um die vorgegebenen Verschiebungen aufrechtzuerhalten. Sie sollten jedoch nicht erwarten, dass dieses Feld eine genaue Darstellung des lokalen Spannungsfeldes an der Beschränkung ist. In integrierter Hinsicht ist es jedoch sehr genau.
Um das Traktionsfeld für die Reaktionen zu veranschaulichen, wird der kurze Auslegerbalken in der folgenden Abbildung untersucht. Am festen Ende werden schwache Nebenbedingungen angewendet.
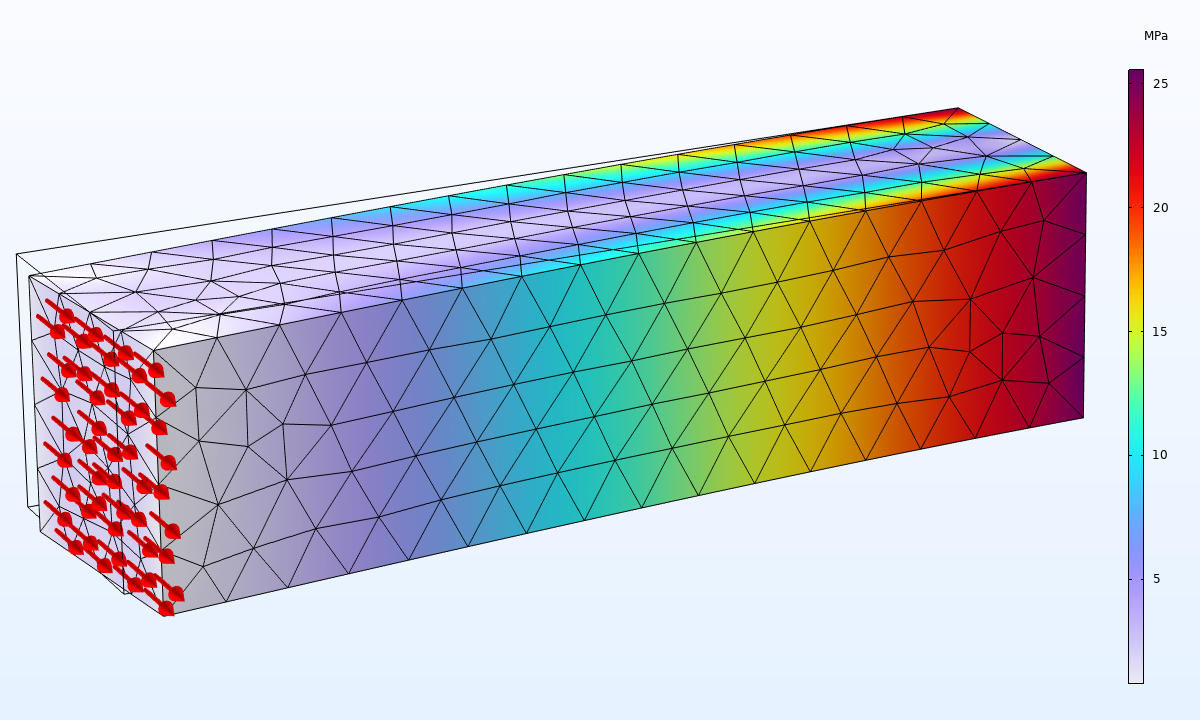 Auslegerbalken mit Von-Mises-Spannung und aufgebrachten Lasten.
Auslegerbalken mit Von-Mises-Spannung und aufgebrachten Lasten.
Als Nächstes wird die Scherspannung am eingeschränkten Ende untersucht. Gemäß der analytischen Lösung weist sie eine parabolische Verteilung über den Querschnitt auf. Die Poisson-Zahl wurde auf Null gesetzt, um die Auswirkungen der Einschränkung zu minimieren. Im gegebenen Koordinatensystem verursacht die aufgebrachte Last die Scherspannung σxy (und eine Biegenormalkraft σxx). Da die Normale der festen Oberfläche in Richtung x verläuft, ist die Zugkomponente ty = σxy. Sie sollte daher durch den Lagrange-Multiplikator für die Nebenbedingung in Richtung y dargestellt werden. Diese Ergebnisse werden in der folgenden Abbildung verglichen.
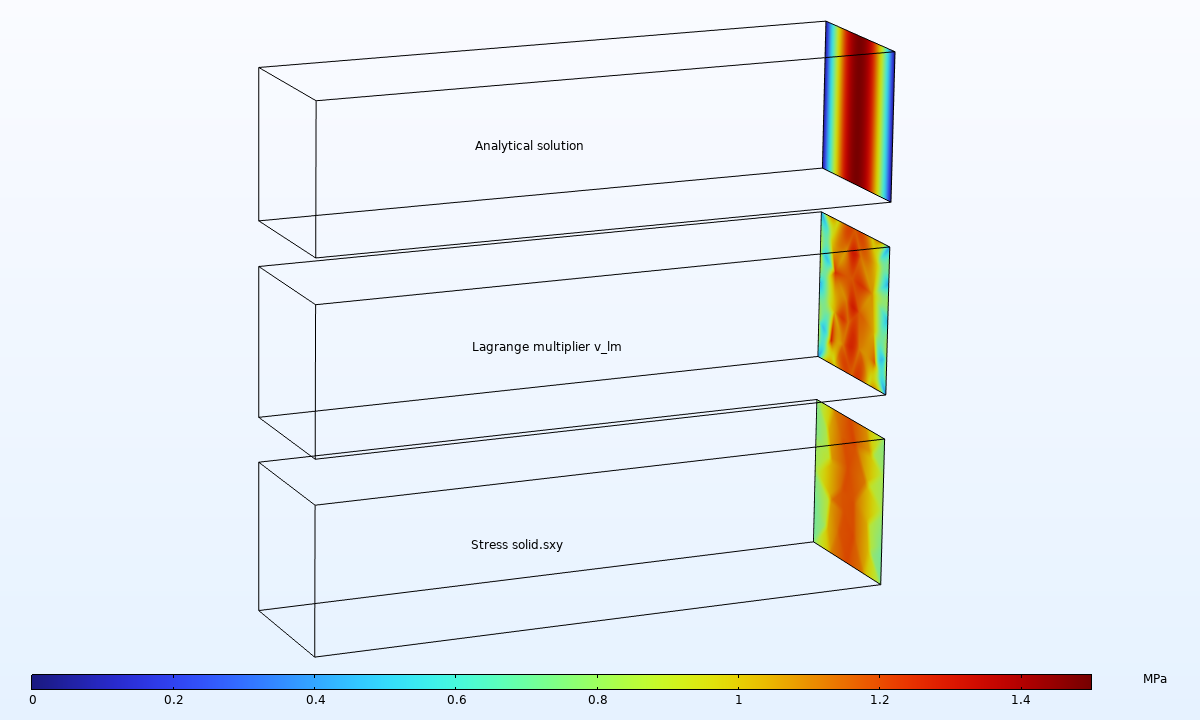 Vergleich der berechneten Scherspannung, des Wertes des Lagrange-Multiplikators und der analytischen Lösung.
Vergleich der berechneten Scherspannung, des Wertes des Lagrange-Multiplikators und der analytischen Lösung.
Mit der verwendeten Netzauflösung liefern weder die Spannung noch der Lagrange-Multiplikator eine sehr genaue Darstellung der tatsächlichen Lösung. Es gibt jedoch einen wesentlichen Unterschied: Bei der Integration beträgt der relative Fehler in der Gesamtreaktionskraft in Y-Richtung 3 % bei Verwendung der Spannung und 2·10-12 bei Verwendung des Lagrange-Multiplikators.
Wenn Sie Ihre eigenen schwachen Nebenbedingungen formulieren, können die Werte der Lagrange-Multiplikatoren je nach Formulierung der Nebenbedingung mehr oder weniger aussagekräftig sein. Nehmen wir beispielsweise an, dass ein Punkt so beschränkt werden soll, dass er sich nach der Verformung irgendwo auf einem Kreis mit dem Radius R um seine ursprüngliche Position befindet.
Nachfolgend werden zwei verschiedene Möglichkeiten zur Angabe einer solchen Nebenbedingung dargestellt:


Verschiedene Möglichkeiten, dieselbe Nebenbedingung in den Einstellungen für den Knoten Weak Constraint anzugeben.
Beide Ausdrücke führen zu derselben Lösung mit einer ähnlichen Anzahl von Iterationen. Im ersten Fall ist der Wert des Lagrange-Multiplikators jedoch sehr schwer zu interpretieren. Aus dimensionaler Sicht hat er die Einheit N/m (da er eine Nebenbedingung mit der Einheit m2 multipliziert). Bei der zweiten Formulierung ist es tatsächlich die radiale Verschiebung, die er beschränkt. Der berechnete Lagrange-Multiplikator ist die Kraft, die vom Stützpunkt auf die Struktur wirkt. Die Ausrichtung der Reaktionskraft ist nicht offensichtlich, wirkt jedoch in radialer Richtung. Physikalisch gesehen wird die Struktur somit von einem reibungsfreien kreisförmigen Rand gestützt.
Es gibt jedoch zwei mögliche korrekte Lösungen für dieses Problem. Es gibt zwei Stellen auf dem Kreis, an denen der Punkt anliegen kann. Dies entspricht im Wesentlichen einem Kontaktpunkt auf der Innenseite des Kreises oder auf der Außenseite des Kreises. Die Lösung hängt von den Anfangsbedingungen ab.
Was Sie bei der Verwendung einer schwachen Nebenbedingung beachten sollten
Konfliktierende Nebenbedingungen
Die häufigste Ursache für Probleme bei der Verwendung schwacher Nebenbedingungen besteht darin, dass sie nicht mit den standardmäßigen punktweisen Nebenbedingungen koexistieren können, wenn sie auf denselben Freiheitsgrad angewendet werden. Ein solcher Konflikt kann zu Fehlern wie “singular matrix”, “NaN or Inf found” oder sogar zu einer völlig falschen Lösung führen. Dies ist in der Regel nicht beabsichtigt, kann jedoch unbeabsichtigt auftreten.
Ein Beispiel hierfür ist die Verwendung einer schwachen Nebenbedingung an einem Rand und einer punktweisen Nebenbedingung an einem angrenzenden Rand. In diesem Fall kommt es zu einem Konflikt an der gemeinsamen Kante. In der Regel ist es am einfachsten, alle verbundenen Nebenbedingungen in dieselbe Formulierung umzuwandeln (wahrscheinlich in eine schwache, da es einen Grund gab, warum Sie diese ursprünglich ausgewählt haben). Einige Nebenbedingungen verfügen in ihren Einstellungen auch über die Optionen Exclude Edges und Exclude Points. Indem Sie die konfliktierende Kante zu einer solchen Auswahl hinzufügen, können Sie das Problem ebenfalls lösen.
In einigen Fällen ist es nicht offensichtlich, dass überhaupt ein Konflikt auftreten kann. Es kann Nebenbedingungen geben, an die Sie nicht gedacht haben, da sie mehr oder weniger automatisch hinzugefügt wurden. Eine Kontinuitätsbedingung ist ein solcher Fall.
Komplizierter ist die Situation im Interface Shell, wo jeder Knoten eine implizite Nebenbedingung für einen Rotationsfreiheitsgrad (Rotation um die Normale zur Schalenoberfläche) hat. Wenn Sie also eine schwache Nebenbedingung, die Rotationen beinhaltet (z. B. eine Fixed Constraint), zu einem Objekt in einem Shell-Interface hinzufügen, kommt es zu einem Konflikt. Alle Rotationsbeschränkungen (einschließlich der impliziten) müssen dann in eine schwache Formulierung geändert werden.
Einheiten von Lagrange-Multiplikatoren
In den meisten Fällen haben die Lagrange-Multiplikatoren in COMSOL Multiphysics® keine Einheit. Dadurch unterscheiden sie sich von fast allen anderen Größen. Die Einheit ist implizit und kann nur aus Ihrem Wissen darüber abgeleitet werden, was das Reaktionsfeld darstellt. Wenn Sie Lagrange-Multiplikatoren bei der Ergebnisauswertung intensiv nutzen möchten, empfiehlt es sich, Zwischenvariablen zu erstellen, in denen Sie die Einheit angeben.
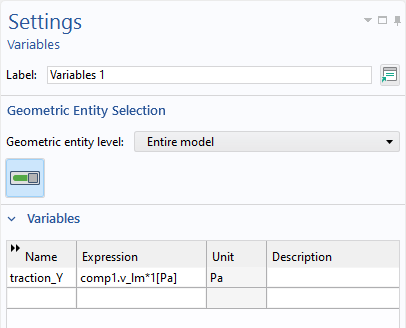
Hinzufügen einer Variablen mit einer Einheit zur Darstellung eines Lagrange-Multiplikatorfeldes.
Variablenskalierung
In einigen Fällen kann die Einbeziehung von Lagrange-Multiplikatoren dazu führen, dass ein nichtlineares Problem viele Iterationen erfordert oder sogar nicht konvergiert. Der wahrscheinlichste Grund dafür ist, dass die Toleranzen nicht ordnungsgemäß behandelt wurden. Die beste Möglichkeit, dies zu beheben und sicherzustellen, dass die Toleranzen ordnungsgemäß behandelt werden, besteht darin, eine manuelle Skalierung der Lagrange-Multiplikator-Freiheitsgrade durchzuführen. Gehen Sie dazu zu den Knoten Dependent Variables in der Lösersequenz und fügen Sie eine geeignete Skalierung hinzu. Die Skalierung sollte die Größenordnung des Lagrange-Multiplikators angeben, d. h. den Reaktionsfluss, den er darstellt.
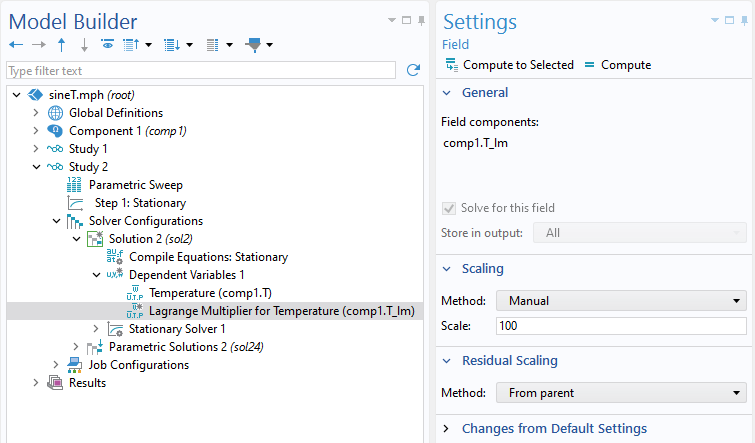 Festlegen einer manuellen Skala für eine Variable.
Festlegen einer manuellen Skala für eine Variable.
Iterative Löser
Wenn Sie einen iterativen Löser zur Lösung des linearen Gleichungssystems verwenden, können Lagrange-Multiplikatoren zu Problemen führen. Es gibt Nullstellen auf der Diagonalen der Steifigkeitsmatrix, sodass diese nicht mehr positiv definit ist, wie es bei den meisten Standard-Finite-Elemente-Formulierungen der Fall wäre.
Aus diesem Grund können bestimmte lineare Löser und Vorkonditionierer nicht zur Lösung von Problemen mit schwachen Nebenbedingungen verwendet werden, nämlich der iterative Konjugierte-Gradienten-Löser und die SOR-Klasse von Vorkonditionierern und Glättungsalgorithmen. Sie können einen anderen iterativen Löser ausprobieren und den Vanka-Algorithmus mit den Lagrange-Multiplikatoren als Vanka-Variablen verwenden oder den unvollständigen LU-Faktorisierungsalgorithmus als Vorkonditionierer einsetzen.
Bei multiphysikalischen Problemen besteht eine Möglichkeit darin, einen segregierten Ansatz zu verwenden und, sofern dies aufgrund der Modellgröße machbar ist, einen direkten Löser für die Felder zu verwenden, die Lagrange-Multiplikatoren beinhalten.
Singularität in Lagrange-Multiplikator-Freiheitsgraden
Wenn Sie eine Standardnebenbedingung in eine schwache Nebenbedingung umwandeln, verhält sie sich numerisch gut. Wenn Sie jedoch eigene nichtlineare Nebenbedingungen oder bestimmte Ausdrücke für Nebenbedingungsvariablen verwenden, kann es vorkommen, dass der Lagrange-Multiplikator-Teil der Steifigkeitsmatrix singulär wird.
Das oben verwendete Beispiel für eine nichtlineare Nebenbedingung, bei dem ein Knoten so beschränkt ist, dass er sich nur in einem Kreis um seinen ursprünglichen Standort bewegen kann, wird in seiner ursprünglichen Konfiguration tatsächlich fehlschlagen.

Der Nebenbedingungsausdruck ist hier tatsächlich ein Paraboloid mit dem Knotenpunkt als Mittelpunkt, sodass sein Gradient Null ist, wenn u = v = 0. Dies lässt sich leicht durch Hinzufügen einer Anfangsbedingung für das Verschiebungsfeld beheben.
Alternativ könnten Sie dem Lagrange-Multiplikator-Freiheitsgrad eine künstliche „Steifigkeit“ hinzufügen. Im obigen Beispiel können Sie den Ausdruck wie folgt ergänzen: u^2+v^2-R^2+1e-6*lm*(u^2+v^2 < 0.01*R^2)
Der Name der Lagrange-Multiplikator-Variablen lautet lm. Aufgrund des booleschen Ausdrucks ist der zusätzliche Beitrag nur bei kleinen Verschiebungen aktiv, sodass er die tatsächliche Lösung nicht beeinflusst. Der Effekt besteht darin, eine kleine Zahl auf die Diagonale der Steifigkeitsmatrix zu setzen, um die anfängliche Singularität zu vermeiden.
Die gleiche Methode wurde im Abschnitt über schwache Nebenbedingungen unseres folgenden Blog-Beitrags verwendet: "Wie Sie konditionale Randbedingungen in Ihrer Simulation nutzen können". Dort war der Grund für die Singularität, dass nur ein zeitabhängiger Teil eines Rands einen vorgegebenen Wert hatte. Auf dem verbleibenden Teil dieser Grenze waren die Lagrange-Multiplikator-Freiheitsgrade weiterhin vorhanden, jedoch ohne Gleichungen, die sie definierten.
Weitere Ressourcen
Die schwachen Nebenbedingungen in COMSOL Multiphysics® sind leistungsstarke Modellierungswerkzeuge. Um sie erfolgreich einsetzen zu können, ist jedoch ein gewisses Verständnis der numerischen Vorgänge erforderlich.
Wenn Sie mehr über schwache Formulierungen lernen möchten, lesen Sie auch die folgenden Blog-Beiträge:

Kommentare (0)