Wir leben in einer dreidimensionalen Welt — oder vielleicht vierdimensional, wenn man die Raumzeit berücksichtigt. Dennoch ist es in der technischen Analyse üblich, 2D-Näherungen zu verwenden, um sowohl Modellierungs- als auch Rechenressourcen zu sparen. In diesem Blogbeitrag werfen wir einen Blick darauf, wann und wie es möglich ist, Aufgabenstellungen im Bereich der Festkörpermechanik mit 2D-Formulierungen zu untersuchen.
Inhaltsverzeichnis
- Was ist 2D?
- Verschiedene 2D-Formulierungen für Festkörpermechanik
- Konstitutive Modelle
- Welche Formulierung sollte ich wählen?
- Warum treten Querspannungen auf?
- Was ist mit Spannungen in der Ebene?
- Inelastische Dehnungen
- Eine Anmerkung zu Vergleichsspannungen
- Eine Anmerkung zur Bruchmechanik
- 1D-Theorien
Anmerkung des Herausgebers: Dieser Blog-Beitrag wurde am 16. Dezember 2022 aktualisiert, um die neuen Features und Funktionen der Version 6.1 der COMSOL Multiphysics® Software zu berücksichtigen.
Was ist 2D?
Im wirklichen Leben gibt es nicht viel, was tatsächlich zweidimensional ist. Wenn wir zum Beispiel die elektromagnetischen Felder um einen Kabelquerschnitt in 2D untersuchen, sagen wir damit eigentlich: “Dieses Kabel ist gerade und lang. In ausreichender Entfernung von den Enden hängen die Felder nur von der Position in dieser Querschnittsebene ab”. Bei den meisten physikalischen Aufgabenstellungen ist die Idee: In einer 2D-Näherung untersuchen wir einen Querschnitt eines langen, geraden Objekts und ignorieren die Effekte an den Enden.
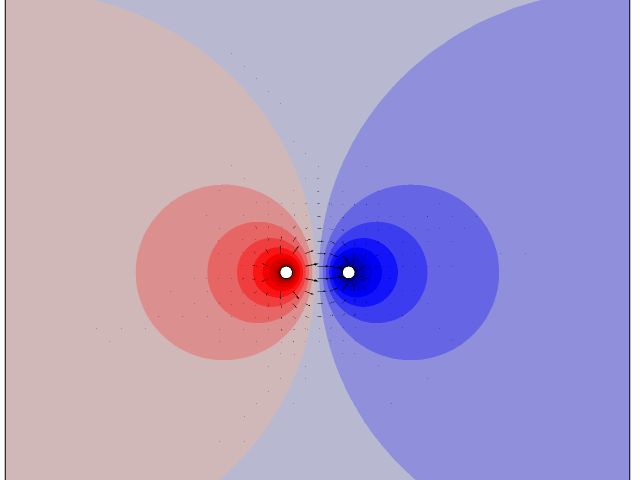
Das elektrische Potenzial (Farbcode) und das elektrische Feld (Pfeile), um zwei lange Kabel mit unterschiedlichen Potenzialen, in 2D berechnet.
Der Querschnitt ist repräsentativ für eine Situation, in der die Kabel lang, gerade und parallel sind.
Warum ist Festkörpermechanik etwas Besonderes?
Im Bereich der Festkörpermechanik gibt es mehr Möglichkeiten für 2D-Zustände als ein sehr langes extrudiertes Objekt. Wir können zum Beispiel eine dünne, flache Platte, die nur in ihrer Ebene belastet wird, als zweidimensional betrachten. Was ist denn das Besondere an der Festkörpermechanik, das dies möglich macht?
Betrachten wir dieselbe Platte im Rahmen einer Wärmetransport-Analyse. In diesem Fall treten Konvektion und Strahlung von den großen Oberflächen in der Richtung außerhalb der Ebene auf. In diesem Fall ist der Temperaturgradient in Richtung der Dicke wichtig. Daher ist eine 2D-Näherung für den Wärmetransport in dünnen Platten schwieriger. Ähnliche Überlegungen lassen sich auch auf viele andere physikalische Phänomene anwenden.
Im Falle der Festkörpermechanik gibt es auch einen Effekt in der Richtung außerhalb der Ebene. Die dünne Platte wird sich im Allgemeinen in Querrichtung verformen. Zum Beispiel wird sie dünner, wenn man sie dehnt. Dies hat jedoch keinen direkten Einfluss auf die Lösung des 2D-Problems. Die Dickenänderung ist ein Ergebnis, das im Nachhinein berechnet werden kann, falls Sie daran interessiert sind. Dies wird weiter unten näher erläutert.
Verschiedene 2D-Formulierungen für Festkörpermechanik
Im folgenden Abschnitt wird davon ausgegangen, dass 2D die xy-Ebene bezeichnet und z der Richtung senkrecht zur entspricht. Die Verschiebungen in der xy-Ebene werden mit u bzw. v bezeichnet, und w ist die Verschiebung in z-Richtung.
Es sei darauf hingewiesen, dass alle Formulierungen identisch sind, wenn es keine Kopplung zwischen Einwirkungen in der Ebene und Einwirkungen außerhalb der Ebene gibt (z. B. wenn die Poissonzahl für ein linear elastisches Material gleich Null ist).
Ebene Dehnung
Die ebene Dehnung ist die einzige der 2D-Festkörpermechanik-Formulierung, die keine Näherungen enthält. Ein Objekt, das in z-Richtung zwischen zwei starren Wänden eingespannt ist, befindet sich im Zustand der ebenen Dehnung. Dies ist auch die Formulierung, die konzeptionell die beste Übereinstimmung mit 2D-Formulierungen in anderen Bereichen der Physik aufweist. Das Objekt muss jedoch nicht “lang” in z-Richtung sein. Dies ist ein grundlegender Unterschied zu den 2D-Näherungen in den meisten anderen Bereichen der Physik.
Die Annahmen sind einfach: Keine Verschiebung in z-Richtung.
{\begin{array}{*{10}{l}}
u&=&u \left ( x,y \right ) \\
v&=&v \left ( x,y \right ) \\
w&=&0
\end{array}}
{\ }
\]
Dies lässt sich entsprechend in Form von Dehnungen ausdrücken:
{\begin{array}{*{10}{l}}
u&=&u \left ( x,y \right ) \\
v&=&v \left ( x,y \right ) \\
\varepsilon_{zz}&=&\varepsilon_{xz}&=&\varepsilon_{yz} &=& 0
\end{array}}
{\ }\]
Man beachte, dass zur vollständigen Vermeidung von Randeffekten angenommen wird, dass an den starren Wänden Gleitrandbedingungen definiert sind, so dass die Verschiebung in der xy-Ebene nicht eingeschränkt wird. Wäre dies nicht der Fall, so befänden wir uns wieder in der Situation, in der wir ein langes Objekt, weit weg von den Enden, untersuchen.
Ebene Spannung
Bei einer ebenen Spannungsformulierung wird davon ausgegangen, dass die drei Komponenten des Spannungstensors, die sich auf die z-Richtung beziehen, Null sind. Dies ist eine gute Näherung für dünne Platten, aber sie ist nur im Grenzfall, wenn die Dicke gegen Null geht, vollständig erfüllt.
{\begin{array}{*{10}{l}}
u&=&u \left ( x,y \right ) \\
v&=&v \left ( x,y \right ) \\
\sigma_{z}&=& \sigma_{xz}&=&\sigma_{yz}&=& 0
\end{array}}
{\ }\]
Auf einer freien Oberfläche herrscht immer ein lokaler Zustand der ebenen Spannung, da dies genau die Randbedingung ist. Deshalb funktioniert die Annahme der ebenen Spannung so gut — sie ist auf den beiden gegenüberliegenden Seiten der Platte genau richtig, und solange die Dicke klein ist, entstehen im Inneren keine nennenswerten Spannungen in z-Richtung.
Verallgemeinerte ebene Dehnung
Leider gibt es keine eindeutige Definition der verallgemeinerten ebenen Dehnung, aber sie bedeutet in der Regel, dass einige der Annahmen für die gewöhnliche Formulierung der ebenen Dehnung gelockert werden. Nehmen wir an, dass der gesamte Dehnungstensor ungleich Null sein darf, aber dennoch nur von x und y abhängt. Dann kann gezeigt werden, dass das folgende Verschiebungsfeld einen solchen Dehnungstensor ergibt:
{\begin{array}{*{10}{l}}
u&=&u \left ( x,y \right ) – \frac{a}{2} z^2 \\
v&=&v \left ( x,y \right ) – \frac{b}{2} z^2 \\
w&=&\left (ax + by +c \right )z
\end{array}}
{\ }
\]
Hier sind die Größen a, b und c Konstanten. Die infinitesimalen Dehnungen außerhalb der Ebene sind dann
{\begin{array}{*{10}{l}}
\varepsilon_{zz}&=&ax +by +c \\
\varepsilon_{xz}&=&\varepsilon_{yz}&=&0
\end{array}}
{\ }
\]
In der Ebene z = 0, in der die Analyse durchgeführt wird, ist w gleich Null. Es gibt also nur noch zwei Komponenten des Verschiebungsfeldes, u und v, für die eine Lösung gefunden werden muss. Es gibt jedoch drei neue Unbekannte, a, b und c. In einer gängigen Interpretation der verallgemeinerten ebenen Dehnung wird nur der Koeffizient c verwendet. Physikalisch bedeutet dies, dass sich das lange Objekt axial in z-Richtung ausdehnen darf. Wenn die Parameter a und b ebenfalls einbezogen werden, darf sich das extrudierte Objekt auch mit einer konstanten Krümmung biegen. Die Werte von a, b und c werden unter der Annahme bestimmt, dass keine axiale Nettokraft oder Biegemomente auf den Querschnitt wirken, d. h. dass die Enden frei sind.
Wenn man in COMSOL Multiphysics® die Option “Verallgemeinerte ebene Dehnung” wählt, hat man die Möglichkeit, zwischen der reinen axialen Dehnungsannahme und der Einbeziehung der Biegung zu wählen.
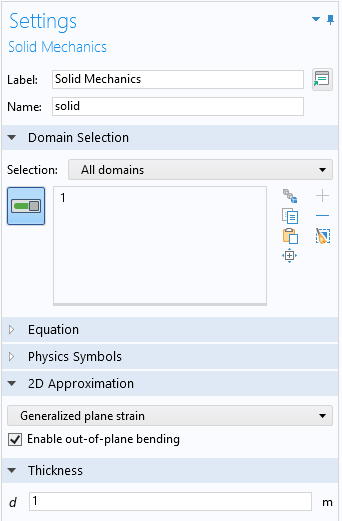
Auswahl der verallgemeinerten ebenen Dehnung.
Es gibt auch andere Formulierungen, die manchmal als verallgemeinerte ebene Dehnungen bezeichnet werden. So kann beispielsweise zugelassen werden, dass die Scherdehnungen außerhalb der Ebene, \varepsilon_{xz} und \varepsilon_{yz}, ungleich Null sind. Eine solche Formulierung, zusammen mit \varepsilon_{zz} = 0, wird in der 2D-Version des Interfaces Elastic Waves, Time Explicit verwendet.
Konstitutive Modelle
Unter der Annahme der linearen Elastizität kann das Hooke’sche Gesetz für ebene Dehnungen und ebene Spannungen angepasst werden. Die vollständige 3D-Form des Hooke’schen Gesetzes lautet
{\begin{array}{*{10}{l}}
\sigma_x &=& \frac{E}{1+\nu} \left( \varepsilon_{xx} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + \varepsilon_{zz} \right )\right ) \\
\sigma_y &=&\frac{E}{1+\nu} \left( \varepsilon_{yy} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + \varepsilon_{zz} \right )\right ) \\
\sigma_z &=&\frac{E}{1+\nu} \left ( \varepsilon_{zz} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + \varepsilon_{zz} \right )\right ) \\
\tau_{xy} &=& 2G \varepsilon_{xy} \\
\tau_{yz} &=& 2G \varepsilon_{yz} \\
\tau_{xz} &=& 2G \varepsilon_{xz} \\
\end{array}}
{\ }
\]
Dabei ist E der Elastizitätsmodul, ν die Poissonzahl und G der Schermodul.
Ebene Dehnung
Der Fall der ebenen Dehnung ist unkompliziert; es ist lediglich erforderlich, die drei Dehnungskomponenten, die Null sind, aus der 3D-Formulierung zu entfernen:
{\begin{array}{*{10}{l}}
\sigma_x &=& \frac{E}{1+\nu} \left( \varepsilon_{xx} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} \right )\right ) \\
\sigma_y &=&\frac{E}{1+\nu} \left( \varepsilon_{yy} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} \right )\right) \\
\sigma_z &=&\frac{E \nu}{(1+\nu)(1-2 \nu)} \left( \varepsilon_{xx} + \varepsilon_{yy}\right ) &=& \nu \left ( \sigma_x + \sigma_y \right )\\
\tau_{xy} &=& 2G \varepsilon_{xy} \\
\tau_{yz} &=& 0 \\
\tau_{xz} &=& 0 \\
\end{array}}
{\ }
\]
Ebene Spannung
Für den Fall der ebenen Spannung kann die Tatsache, dass \sigma_z = 0 ist, dazu verwendet werden, \varepsilon_{zz} zu eliminieren, so dass sich folgendes ergibt:
{\begin{array}{*{10}{l}}
\sigma_x &=& \frac{E}{1-\nu^2} \left( \varepsilon_{xx} +\nu \varepsilon_{yy} \right) \\
\sigma_y &=& \frac{E}{1-\nu^2} \left( \varepsilon_{yy}+\nu \varepsilon_{xx} \right) \\
\sigma_z &=& 0 \\
\tau_{xy} &=& 2G \varepsilon_{xy} \\
\tau_{yz} &=& 0 \\
\tau_{xz} &=& 0 \\
\end{array}}
{\ }
\]
Die Querdehnung (also die Dickenänderung) kann dann aus der Lösung als \varepsilon_{zz} = – \frac {\nu} {1-\nu} (\varepsilon_{xx} + \varepsilon_{yy}) berechnet werden.
In der COMSOL Multiphysics®-Software wird diese Formulierung jedoch nicht verwendet. Stattdessen wird das vollständige 3D-Hooke’sche Gesetz zusammen mit einem zusätzlichen unbekannten Feld für \varepsilon_{zz} verwendet. Dadurch erhöht sich natürlich die Gesamtgröße des Modells, aber die Vorteile sind enorm: Es müssen keine speziellen ebenen Spannungsformen für alle Materialmodelle berücksichtigt werden. Darüber hinaus müssen z. B. die thermische Ausdehnung und ähnliche Eigenschaften nicht geändert werden. Wenn man die Querspannung, \sigma_{z} darstellt, wird man jedoch feststellen, dass der Wert nicht identisch Null ist, da er aus den Dehnungsfeldern unter Verwendung des Hooke’schen Gesetzes berechnet wird.
Verallgemeinerte ebene Dehnung
Dieser Fall ist etwas komplizierter. Wenn die Annahmen für die Dehnungen außerhalb der Ebene in die konstitutive Gleichung eingefügt werden, werden die Spannungskomponenten durch die Koeffizienten a, b und c ausdrücklich von den Koordinaten x und y abhängig.
{\begin{array}{*{10}{l}}
\sigma_x &=& \frac{E}{1+\nu} \left( \varepsilon_{xx} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + ax +by +c \right )\right) \\
\sigma_y &=&\frac{E}{1+\nu} \left( \varepsilon_{yy} +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + ax +by +c \right )\right) \\
\sigma_z &=&\frac{E}{1+\nu} \left( ax +by +c +\frac{\nu}{1-2 \nu} \left ( \varepsilon_{xx} + \varepsilon_{yy} + ax +by +c \right )\right) \\
\tau_{xy} &=& 2G \varepsilon_{xy} \\
\tau_{yz} &=& 0 \\
\tau_{xz} &=& 0 \\
\end{array}}
{\ }
\]
Inkompressible Materialien
Je geringer der Grad der Kompressibilität ist, desto stärker ist die Kopplung zwischen der Einwirkung in der Ebene und außerhalb der Ebene. Insbesondere viele Modelle für Plastizität, Kriechen und Hyperelastizität gehen von Inkompressibilität aus. Bei der Arbeit mit solchen Materialmodellen ist die Auswirkung der gewählten 2D-Annahme besonders stark.
Welche Formulierung sollte ich wählen?
Untersuchen wir den einfachen Fall einer rechteckigen Platte mit einem kreisförmigen Loch in der Mitte. Wir beginnen mit einer sehr dünnen Platte und gehen dann zu einem dicken Objekt über, bei dem das Loch eher wie ein langer gebohrter Tunnel aussieht.
Die Abmessungen der Platte in der Ebene betragen 2 m x 1 m, und der Durchmesser des Lochs beträgt 0.4 m. Es wird eine Zugbelastung von 1 MPa aufgebracht. Es werden Materialdaten für Stahl verwendet. Die Lösung der ebenen Spannung ist unten dargestellt.
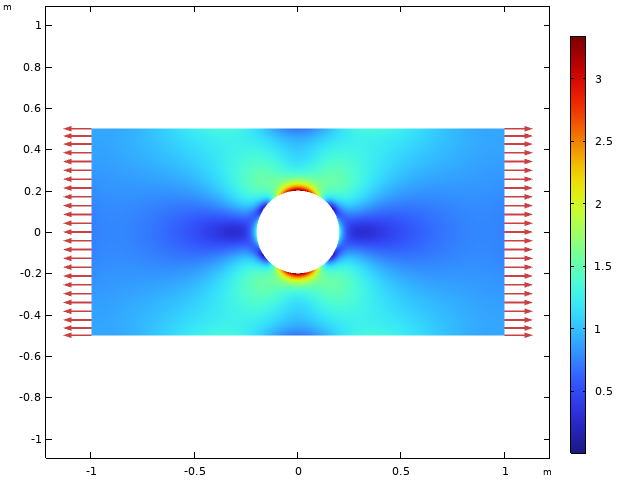
Von-Mises-Vergleichsspannung, unter der Annahme einer ebenen Spannung.
Unter der Annahme ebener Spannungen ist die Querspannung \sigma_{z} Null.
Als Nächstes wenden wir uns einer vollständigen 3D-Lösung zu und betrachten dasselbe Objekt erneut, jedoch mit den Dicken 0.1, 1 und 10 m. In der Abbildung unten ist die Querspannung, \sigma_{z}, aufgetragen.
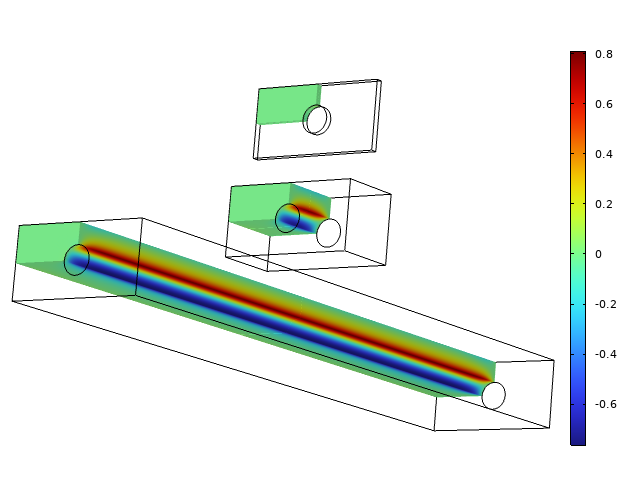
Querspannung für drei verschiedene Dicken.
Die Querspannung ist für die dünne Konfiguration vernachlässigbar, so dass die ebene Spannung eine gute Annahme ist. Für die mittlere Dicke ist der Spannungszustand vollständig dreidimensional. Bei einem langen Objekt herrscht, außer an den Enden, eine konstante Querspannung. Man beachte, dass die maximale Querspannung 0.8 MPa beträgt, also keineswegs vernachlässigbar ist, wenn man sie mit der aufgebrachten Last vergleicht.
Nachfolgend wird die Querspannung an der am stärksten beanspruchten Stelle im oberen Teil des Lochs genauer untersucht.
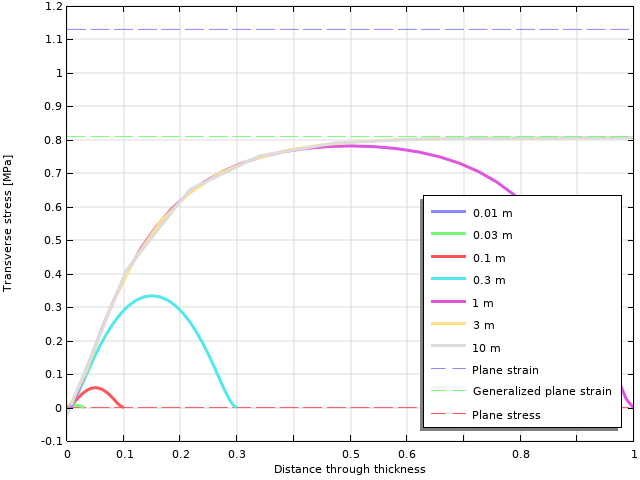
Veränderung der Querspannung über die Dicke. Der Parameter für die Diagramme ist die Dicke des Objekts.
Wie man sieht, wird bei einer Dicke von 1 m oder mehr ein Spitzenwert von etwa 0.8 MPa erreicht. Bei geringeren Dicken nimmt die maximale Querspannung schnell ab.
Dieses Diagramm wird uns helfen, zwei häufige Missverständnisse auszuräumen:
- Nur weil ein Objekt in Querrichtung frei ist, bedeutet das nicht, dass es sich in einem Zustand der ebenen Spannung befindet.
- Ein langes Objekt befindet sich nicht notwendigerweise in einem Zustand der ebenen Dehnung. Dies gilt nur, wenn die Enden fixiert sind.
Tatsächlich sieht es so aus, dass
- ein dünnes Objekt mit freien Rändern durch ebene Spannungen approximiert werden kann.
- ein langes Objekt mit freien Rändern von den Enden weg durch eine verallgemeinerte ebene Dehnung angenähert werden kann.
- ein Objekt, dessen Dicke mit den Abmessungen in der Ebene vergleichbar ist, als vollständig 3D betrachtet werden muss.
Die Aussage, dass sich dicke Objekte in einem Zustand der ebenen Dehnung befinden sollten, findet sich fast überall in Lehrbüchern und im Internet. Es stimmt zwar, dass eine ebene Dehnung in dieser Situation eine bessere Annäherung ist als eine ebene Spannung, aber sie ist dennoch nicht korrekt. Eine verallgemeinerte Annahme der ebenen Dehnung ist besser.
Meine persönliche Vermutung ist, dass, da die Arbeit mit 2D-Lösungen aus der Zeit stammt, als viele Probleme mit Stift und Papier gelöst wurden, zum Beispiel mit der Airy-Spannungsfunktion die Wahl in der Praxis zwischen ebener Spannung und ebener Dehnung bestand. Mit Finite-Elemente-Software sind vollständige 3D- oder verallgemeinerte ebene Dehnungen bessere Optionen für dickere Objekte.
Warum treten Querspannungen auf?
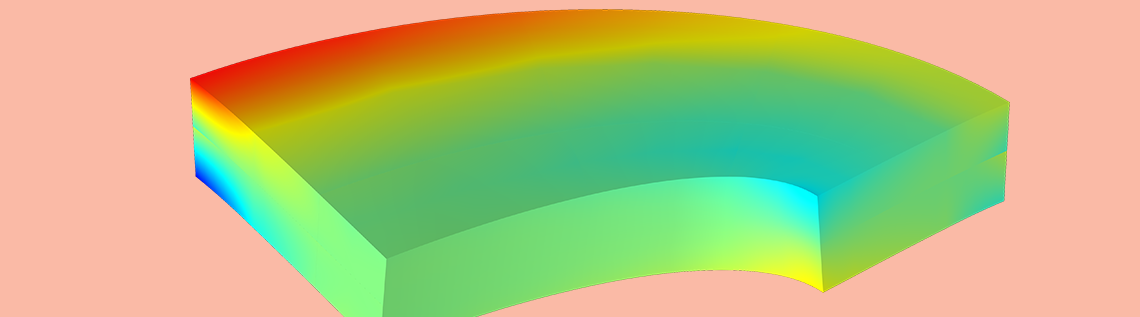
Im obigen Beispiel haben wir gesehen, dass in der Querrichtung erhebliche Spannungen entstehen, obwohl sich das Objekt in dieser Richtung frei bewegen kann. Warum ist das so? Aufgrund des Poissonzahl-Effekts kommt es zu einer Dickenänderung in der Richtung außerhalb der Ebene. Solange in der Ebene ein Spannungs- (und Dehnungs-) Gradient vorhanden ist, ist diese Dickenänderung nicht gleichmäßig. Bei einer Spannungskonzentration, wie dem Loch in der Platte, möchte das Material an der am stärksten belasteten Stelle dünner werden als das Material in seiner Umgebung. Das benachbarte Material wird sich dem widersetzen und versuchen, die Verformung zu unterdrücken.
Veränderung der Querverschiebung weit weg von der freien Oberfläche (unten) und nahe der freien Oberfläche (oben). In jeder Ebene wird die durchschnittliche Verschiebung auf Null gesetzt.
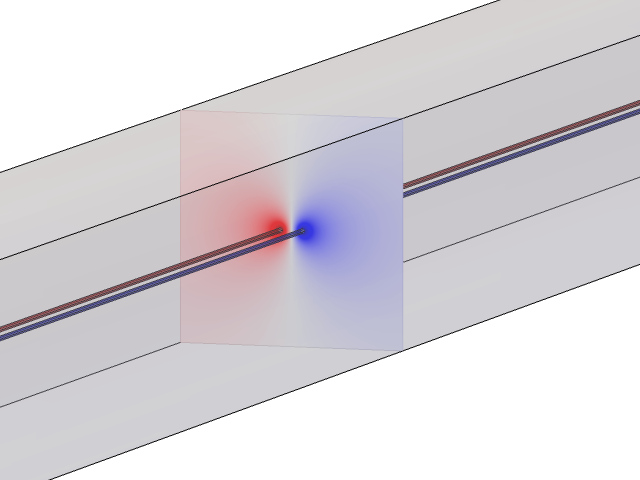
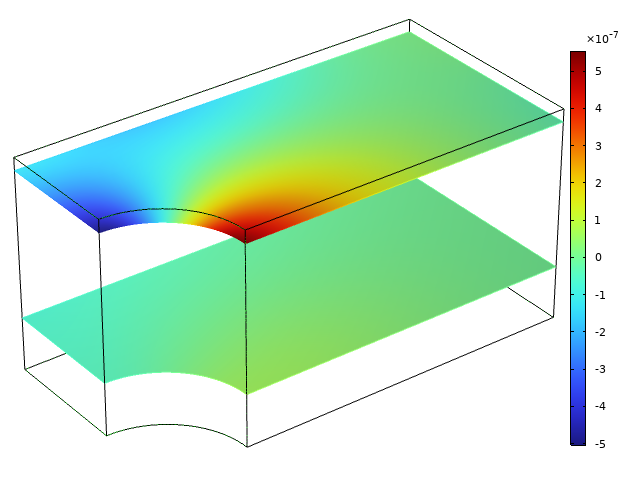
Im vorigen Abschnitt wurde festgestellt, dass die Größe der Querspannung mit dem Abstand von der freien Grenzfläche variiert. Die Details der Spannungsverteilung unterscheiden sich ebenfalls mit dem Abstand von der freien Grenzfläche, wie die folgende Abbildung zeigt.
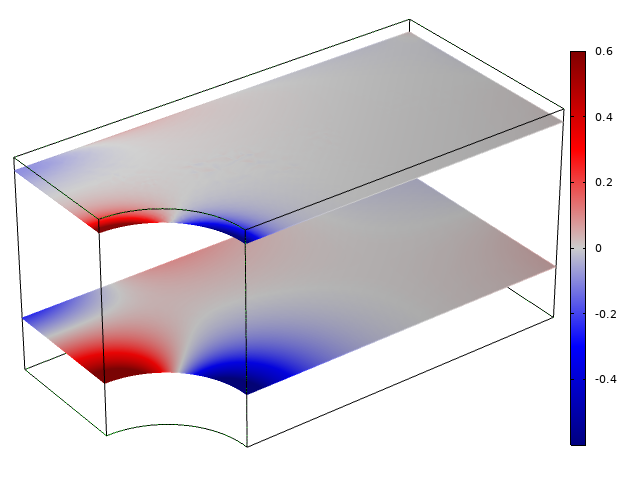
Verteilung der Querspannung fern der freien Oberfläche (unten) und nahe der freien Oberfläche (oben). Die Spannungsfelder sind so skaliert, dass sie in beiden Schnittebenen denselben Spitzenwert aufweisen; die tatsächliche Spannung ist in Randnähe niedriger.
Weit von der freien Oberfläche entfernt, ist die Querspannung direkt proportional zu den Dehnungen in der Ebene \varepsilon_x+\varepsilon_y. Der gesamte Querschnitt behält aufgrund der Zwangswirkung des umgebenden Materials eine mehr oder weniger gleichmäßige Dicke bei. In der Nähe der freien Oberfläche ist die Querspannung jedoch hoch, wenn es große Gradienten in den Dehnungen in der Ebene gibt; in diesem Fall in der Nähe des Randes des Lochs.
Was ist mit Spannungen in der Ebene?
Solange die Struktur nur durch Zug (und nicht durch vorgegebene Verschiebungen) belastet wird, ist der Spannungszustand in der Ebene unabhängig von der 2D-Annahme, zumindest bei linearer Elastizität. Das ist jedoch nicht die ganze Geschichte. In der nachstehenden Abbildung ist die Spannung in x-Richtung an der am stärksten beanspruchten Stelle am oberen Ende des Lochs dargestellt.
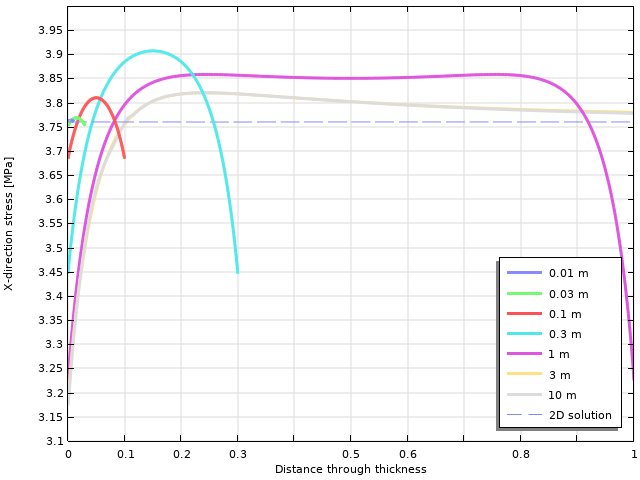
Horizontale Spannungsänderung über die Dicke. Der Parameter für die Diagramme ist die Dicke des Objekts.
Wie zu sehen ist, gibt es eine erhebliche Variation über die Dicke. Bei dünnen Objekten stimmen die 2D-Werte gut überein, während es bei dickeren Objekten einen erheblichen Unterschied gibt, insbesondere an der freien Oberfläche. Dies hat auch Auswirkungen auf die Vergleichsspannungen
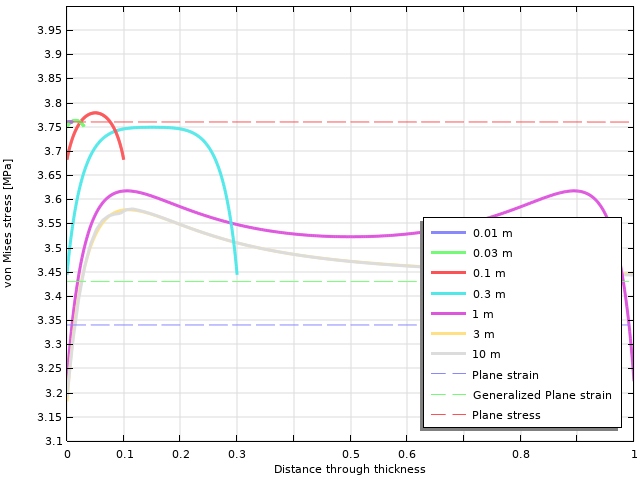
Veränderung der Von-Mises-Vergleichsspannung über die Dicke. Der Parameter für die Diagramme ist die Dicke des Objekts.
Bei dickeren Objekten besteht ein erheblicher Unterschied zwischen der tatsächlichen Vergleichsspannung und einer der 2D-Lösungen. Nur im Inneren von dickeren Objekten konvergiert die Von-Mises-Spannung in Richtung der verallgemeinerten Lösung für ebene Dehnungen.
Inelastische Dehnungen
In vielen Fällen ist der Unterschied zwischen den drei Formulierungen nicht so ausgeprägt wie im vorigen Beispiel, in dem es eine erhebliche Spannungskonzentration gibt. Es gibt jedoch einige Fälle, in denen man besonders aufmerksam sein muss: Wenn inelastische Dehnungen von Bedeutung sind. Dann wirkt nicht nur die Poissonzahl auf die Dehnungen in der Ebene, sondern auch in Querrichtung.
Nehmen wir zum Beispiel die thermische Ausdehnung. Sie ist normalerweise in alle Richtungen gleichmäßig. Das bedeutet, dass bei einer ebenen Dehnung, bei der eine Ausdehnung außerhalb der Ebene unterbunden wird, eine starke Querspannung entsteht. Ein Objekt, das sich in der xy-Ebene frei ausdehnen kann, erfährt eine Querspannung, die \sigma_z = -E \alpha \Delta T beträgt. Wenn man sich für eine Formulierung mit ebener Spannung oder verallgemeinerter ebener Dehnung entscheidet, ist die Ausdehnung in Querrichtung frei, und diese Spannung tritt nicht auf.
Zur Veranschaulichung der Bedeutung der 2D-Formulierung im Falle der Wärmeausdehnung wird der folgende Fall untersucht: Eine quadratische Platte mit freier Ausdehnung in der xy-Ebene wird einem Temperaturfeld ausgesetzt, bei dem die Temperatur proportional zu x*y ist. Die maximale Temperaturerhöhung (in der rechten oberen Ecke) beträgt 100 K. Es werden Materialdaten für Stahl verwendet. Die Spannung in Querrichtung ist in der nachstehenden Abbildung dargestellt.
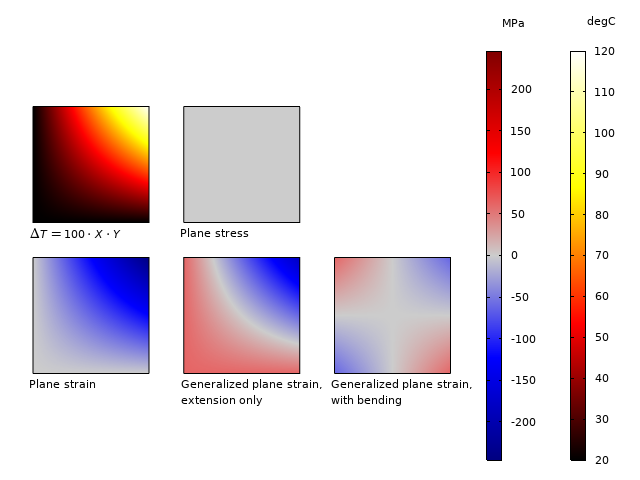
Temperaturverteilung und Spannung außerhalb der Ebene \sigma_z für verschiedene 2D-Annahmen.
Die Ergebnisse zeigen, dass
- für den Fall einer ebenen Spannung die Ausdehnung außerhalb der Ebene frei ist, so dass keine Spannung induziert wird.
- bei ebener Dehnung der gesamte Abschnitt einer Druckspannung mit dem Wert \sigma_z = -E \alpha \Delta T(x,y) ausgesetzt ist. Die Spannung reicht von -245 bis 0 MPa.
- bei einer verallgemeinerten ebenen Dehnung mit reiner Ausdehnung eine konstante Spannung hinzugefügt wird, so dass das durchschnittliche \sigma_z Null wird. Die Spannung reicht von -184 bis 61 MPa.
- für die verallgemeinerte Dehnung mit Biegung auch ein linear variierendes Spannungsfeld hinzugefügt wird. Die Spannung reicht nun von -61 bis 61 MPa.
Eine Anmerkung zu Vergleichsspannungen
Die beiden am häufigsten verwendeten skalaren Spannungsmaße sind die Von-Mises-Vergleichsspannung und die Tresca-Vergleichsspannung. Drückt man sie in Form von Hauptspannungen aus (\sigma_1 > \sigma_2 > \sigma_3), so gilt
und
Wie man sieht, wirkt sich die mittlere Hauptspannung auf die Von-Mises-Vergleichsspannung aus, nicht aber auf die Tresca-Vergleichsspannung. Im 2D-Fall ist die Komponente \sigma_z die außerhalb der Ebene liegt, immer eine der Hauptspannungen. Für den Fall der ebenen Spannung ist sie gleich Null. Für den Fall der ebenen Dehnung ist sie \sigma_z = \nu \left ( \sigma_x + \sigma_y \right ) = \nu \left ( \sigma_{1 \mathrm p} + \sigma_{2 \mathrm p} \right ) für ein linear elastisches Material. Der letzte Ausdruck enthält die beiden Hauptspannungen in der Ebene. Wenn \sigma_{1 \mathrm p} und \sigma_{2 \mathrm p} unterschiedliche Vorzeichen haben, dann ist \sigma_z immer die mittlere Hauptspannung, und die Tresca-Vergleichsspannung wird durch einen Wechsel zwischen ebener Spannung und ebener Dehnung nicht beeinflusst.
Dieses unveränderliche Verhalten ist für die Von-Mises-Vergleichsspannung nicht zu erkennen, da sie von der mittleren Hauptspannung abhängt.
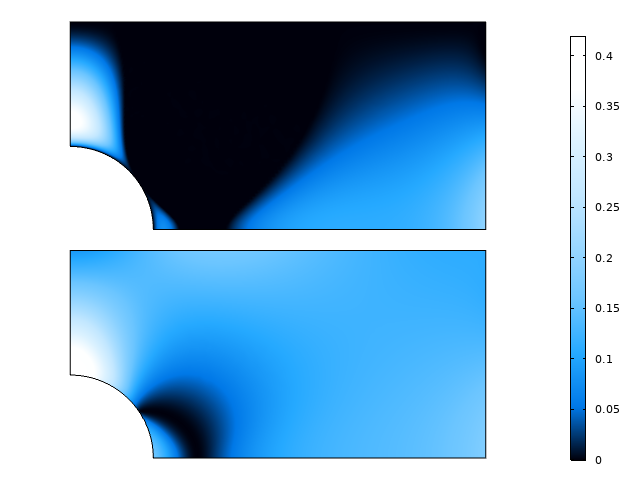
Unterschied zwischen den Vergleichsspannungswerten unter ebenen Spannungs- und Dehnungsbedingungen. Tresca (oben) und von Mises (unten). Man beachte den großen schwarzen Bereich mit Null-Differenz im Tresca-Fall.
Eine Anmerkung zur Bruchmechanik
In der Bruchmechanik ist es üblich, dicke Platten unter der Annahme einer ebenen Dehnung zu analysieren. Warum ist das in Ordnung, wo wir doch gesehen haben, dass die verallgemeinerte ebene Dehnung oder die vollständige 3D-Darstellung die richtigen Optionen sind?
In diesem Zusammenhang ist vor allem der Zustand an der Rissspitze von Bedeutung. Der Dehnungszustand an der Rissspitze ist singulär, so dass eine starke Tendenz zur Kontraktion des Materials in Dickenrichtung besteht. Dem widersetzt sich das umgebende Material, so dass die Verschiebung in Dickenrichtung stark behindert wird. Daher ähnelt der Spannungszustand in der Nähe der Rissspitze einer ebenen Dehnung. Tatsächlich führen eine Lösung mit ebener Dehnung und eine verallgemeinerte Lösung mit ebener Dehnung zu recht ähnlichen Ergebnissen in der Nähe der Rissspitze. Das soll nicht heißen, dass die ebene Dehnung überall in einem ebenen gerissenen Körper eine gute Näherung ist. Tatsächlich unterschätzt die Lösung mit ebener Dehnung die globalen Verformungen etwas. In den meisten Bereichen der Platte, in denen die Spannungsgradienten gering sind, ist die ebene Spannung eine bessere Näherung.
1D-Theorien
Schlanke Strukturen werden oft mit Balken- oder Fachwerknäherungen modelliert. In diesen Fällen werden einaxiale Theorien verwendet. Die Spannungen und Dehnungen in den Querrichtungen sind nicht direkt Teil der Problemformulierung. Wenn Sie die Details studieren, werden Sie jedoch feststellen, dass die Annahme zugrunde liegt, dass es keine Spannungen in den Querrichtungen gibt. Im Wesentlichen gibt es zwei (beliebige) orthogonale Richtungen, in denen ebene Spannungsbedingungen herrschen. Es ist möglich, die Querdehnung a posteriori zu berechnen, wenn dies erforderlich ist. Für ein linear elastisches Material kann die Definition der Poissonzahl direkt verwendet werden. Die Querdehnung ist \varepsilon_T = -\nu \varepsilon_A, wobei \varepsilon_A die axiale Dehnung ist.
Seit Version 6.1 von COMSOL Multiphysics® ist das Interface Solid Mechanics auch für 1D- und 1D-achsensymmetrische Geometrien verfügbar. Auch hier müssen Sie eine Entscheidung über das Verhalten außerhalb der Ebene treffen. Im 1D-Fall können Sie unabhängig zwischen ebener Spannung, ebener Dehnung und verallgemeinerter ebener Dehnung in den beiden Querrichtungen wählen. Im Falle der 1D-Achsensymmetrie haben Sie dieselben drei Optionen für das Verhalten in der Dickenrichtung.


Ein Teil der Einstellungen für das Interface Solid Mechanics in 1D and 1D-Achsensymmetrie.
Nächster Schritt
Das Structural Mechanics Module, ein Add-On zu COMSOL Multiphysics®, enthält spezielle Funktionen für die Modellierung von ebenen Spannungen und ebenen Dehnungen. Erfahren Sie mehr über das Modul, indem Sie auf die Schaltfläche unten klicken:

Kommentare (0)