Starre und flexible Teile
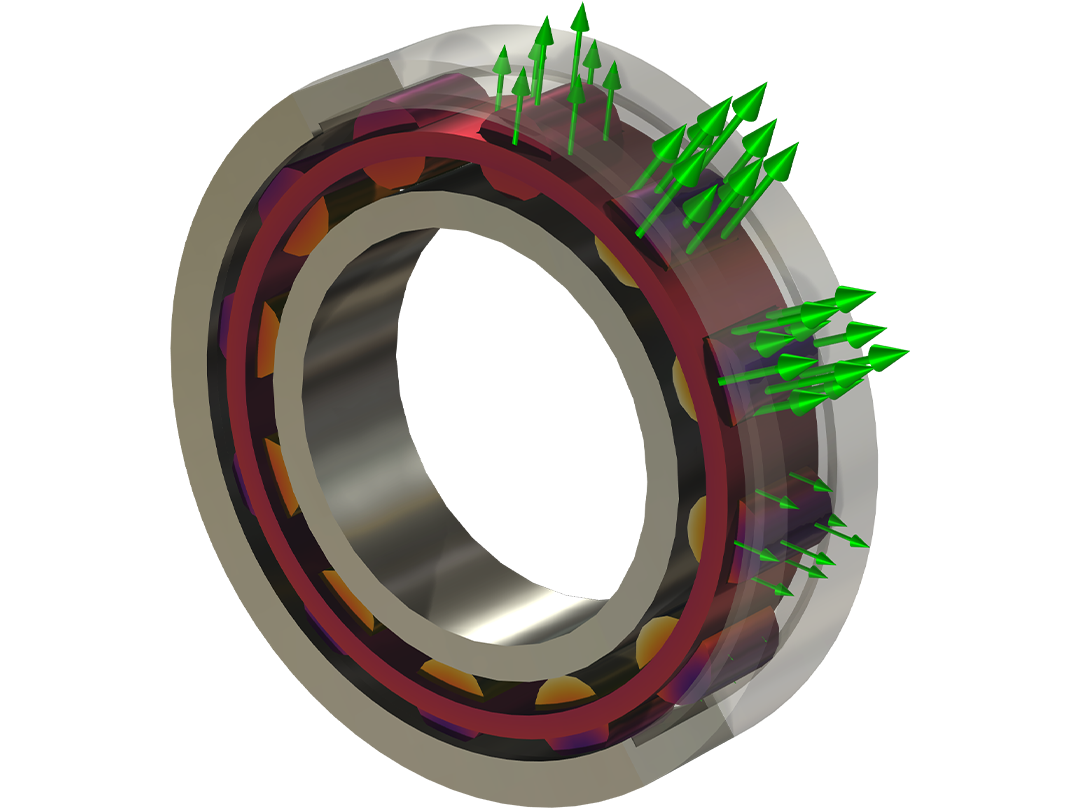
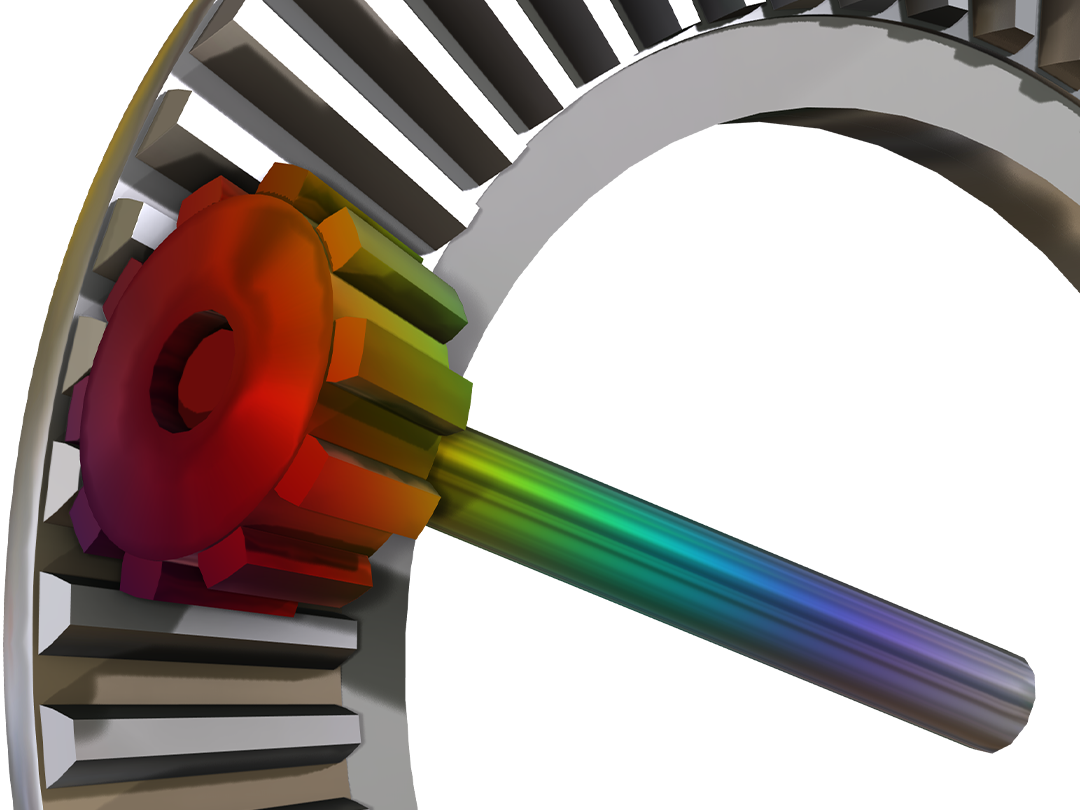
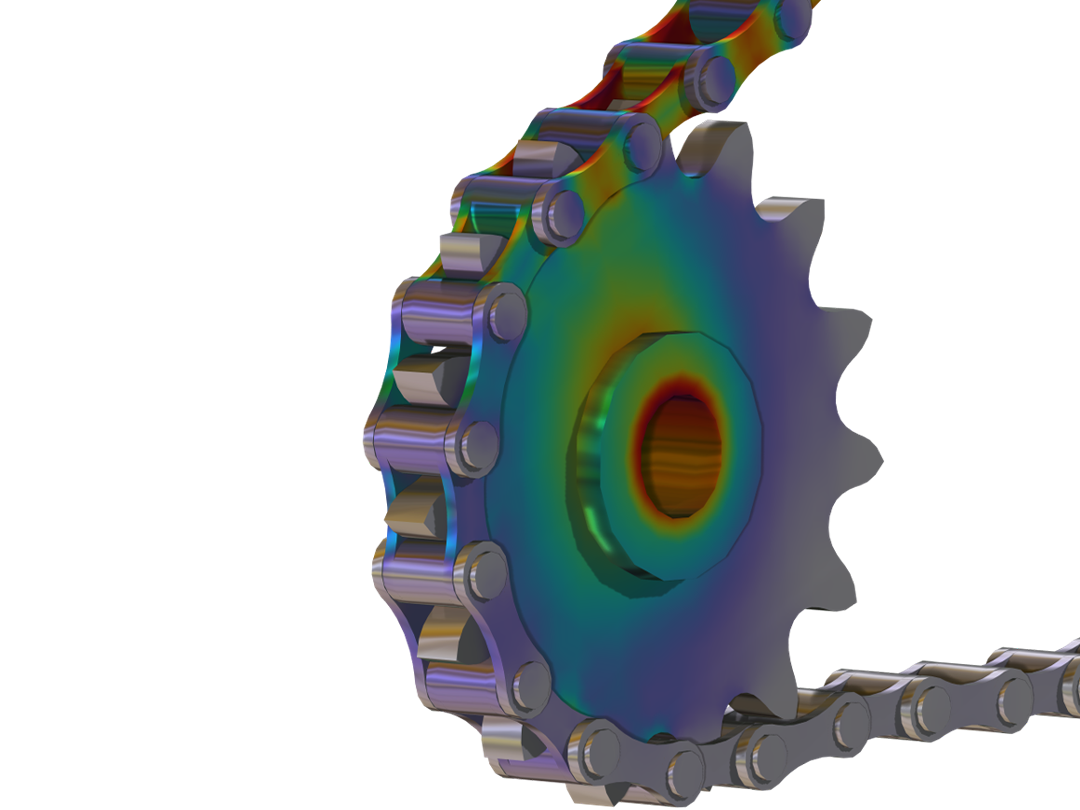
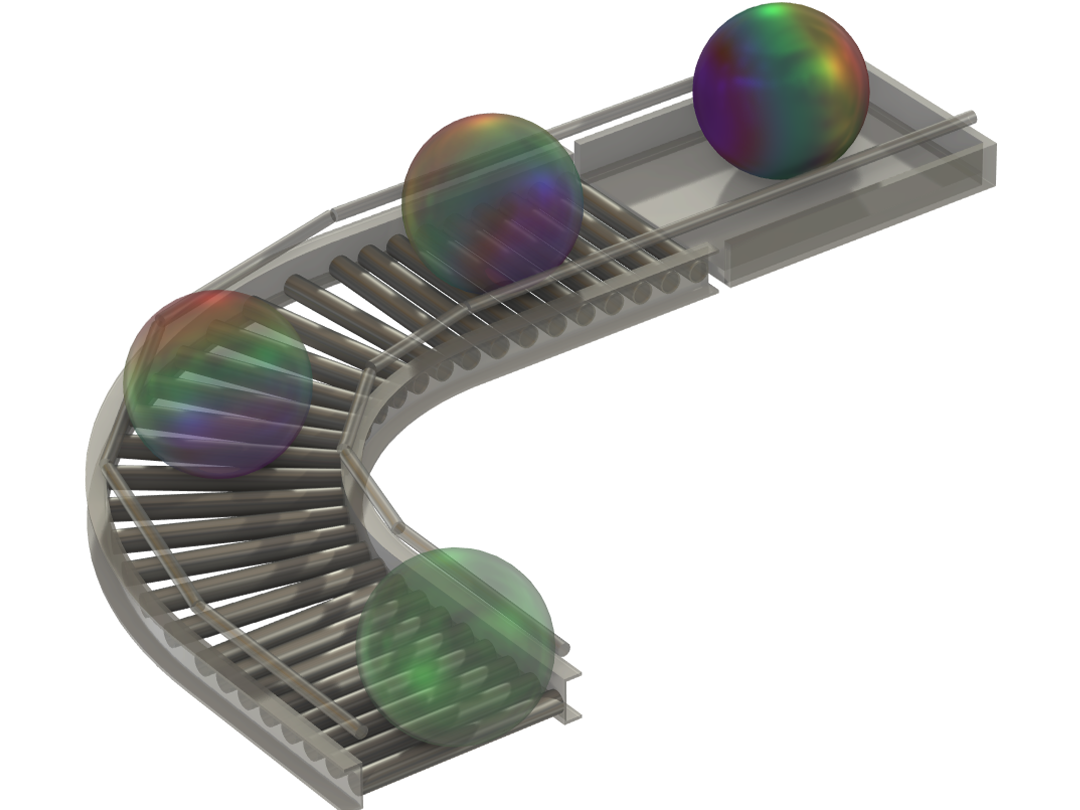
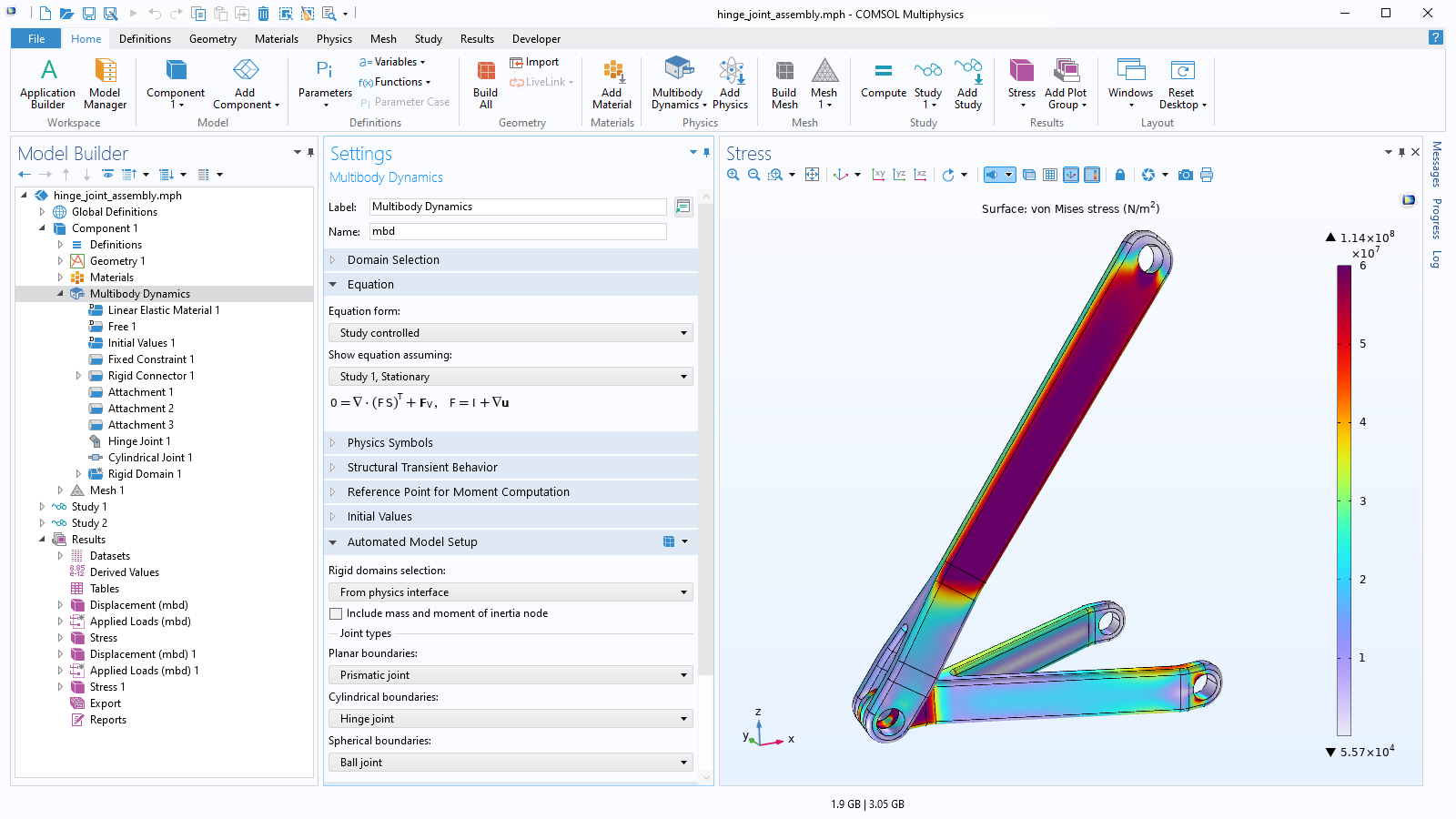
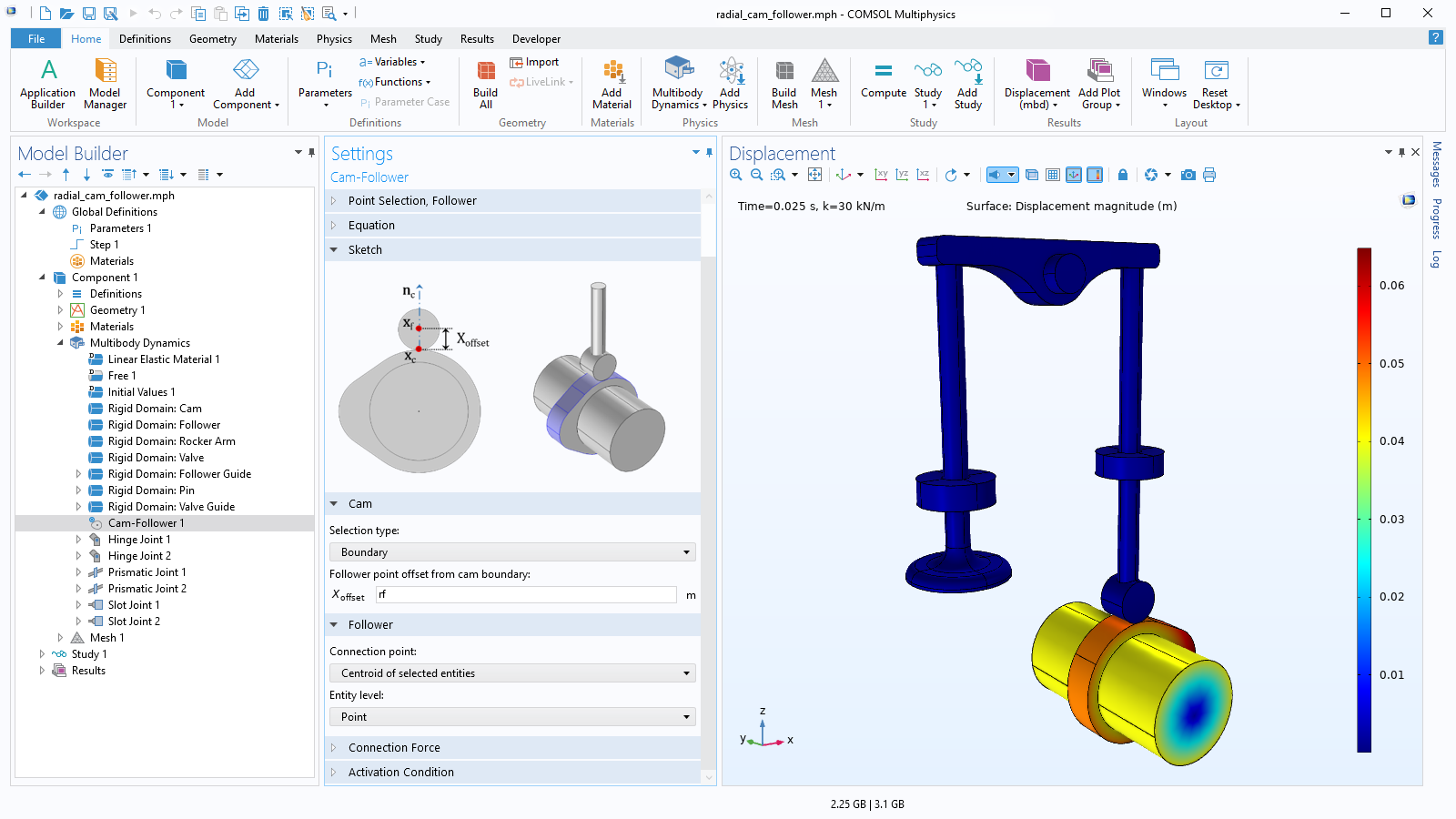
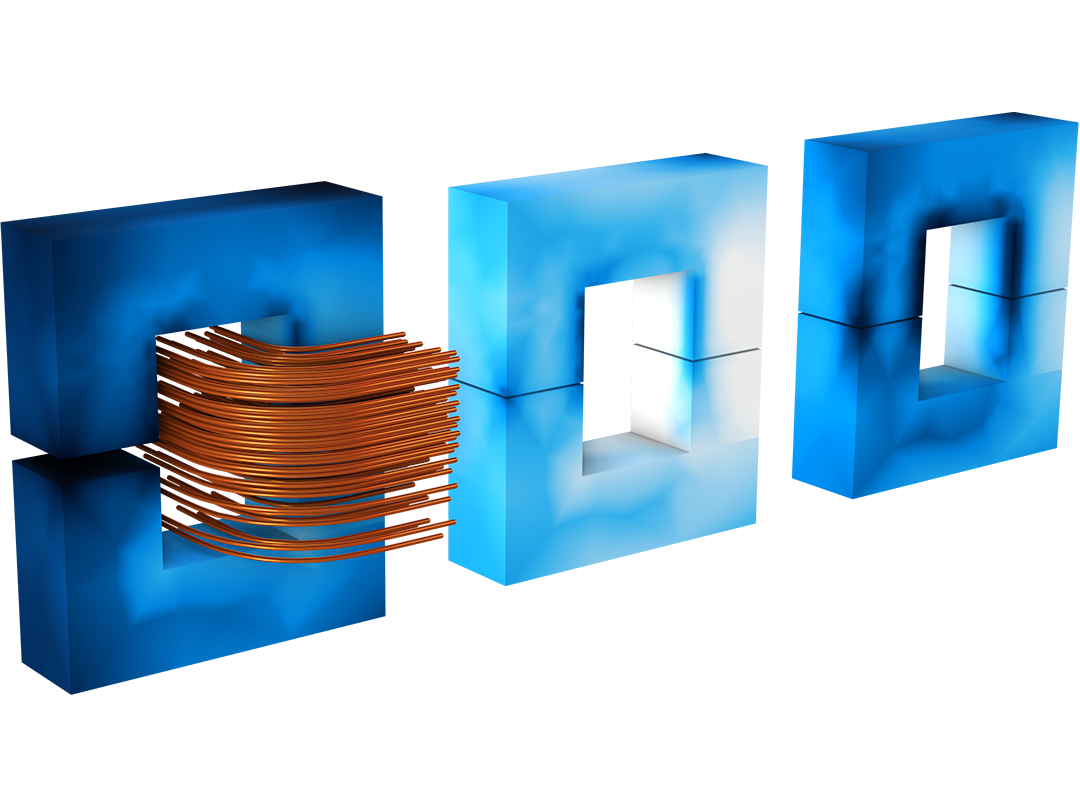
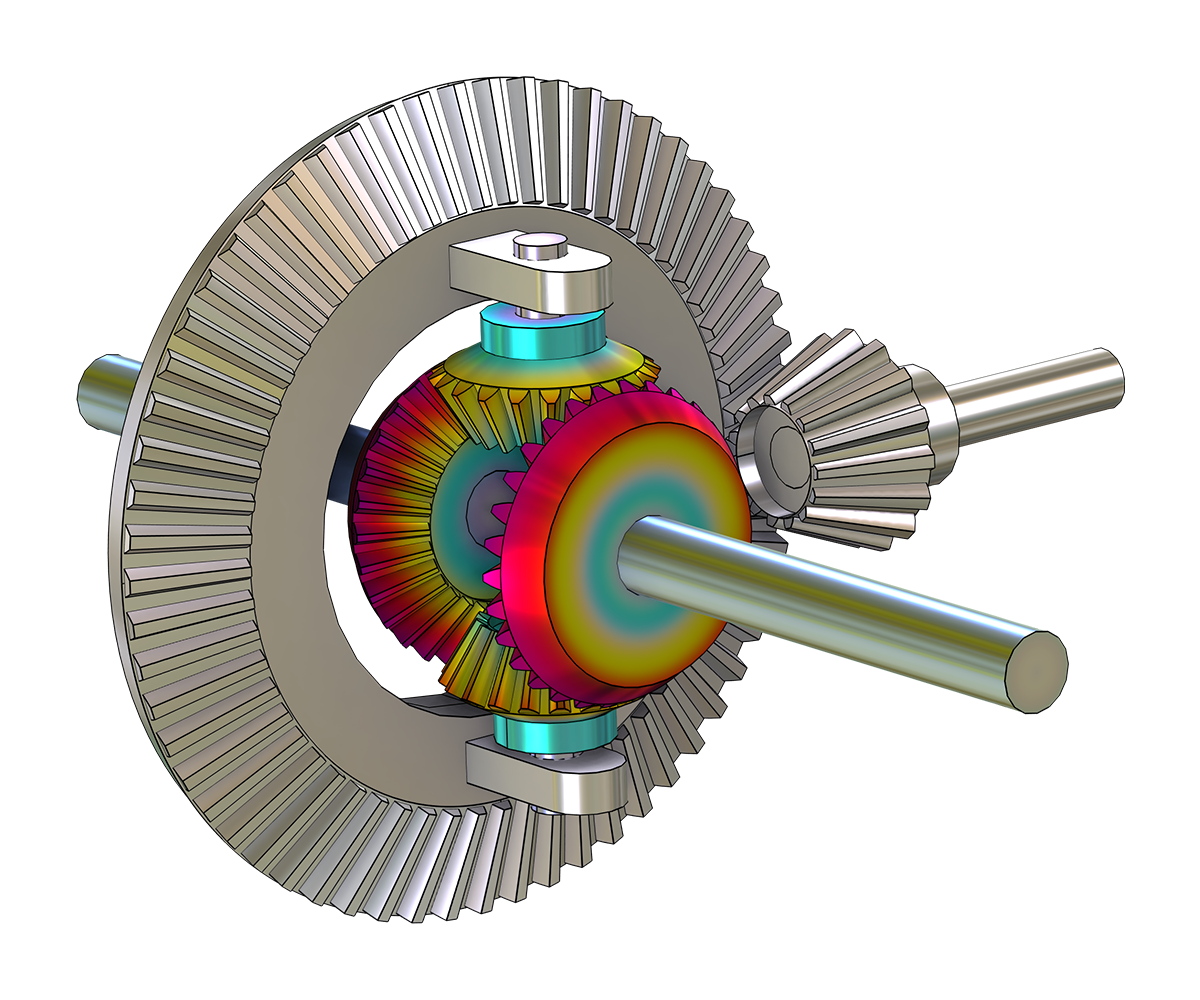
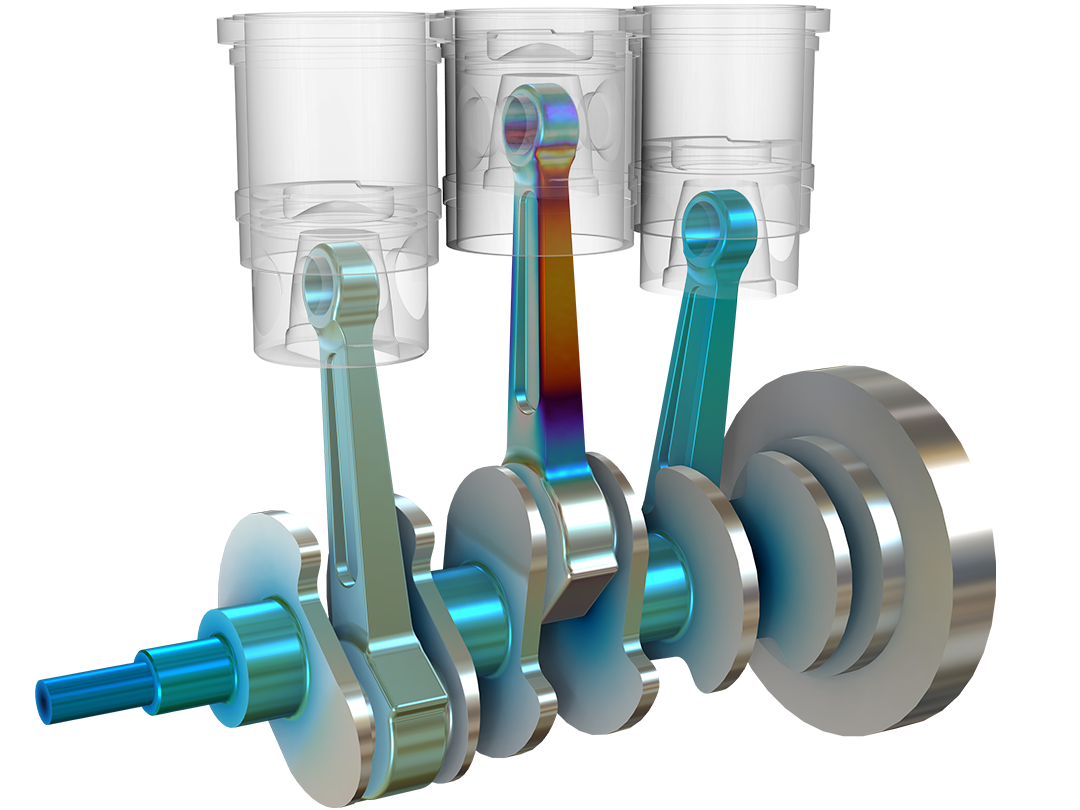
Bei der Modellierung von Mehrkörpersystemen werden flexible und starre Körper über verschiedene Arten von Gelenken, Zahnrädern, Nocken, Lagern, Federn oder Dämpfern miteinander verbunden und sind großen Verschiebungen und Rotationen ausgesetzt. Einer der Vorteile der Verwendung des Multibody Dynamics Module ist, dass es einfach ist, starre und flexible Teile zu kombinieren.
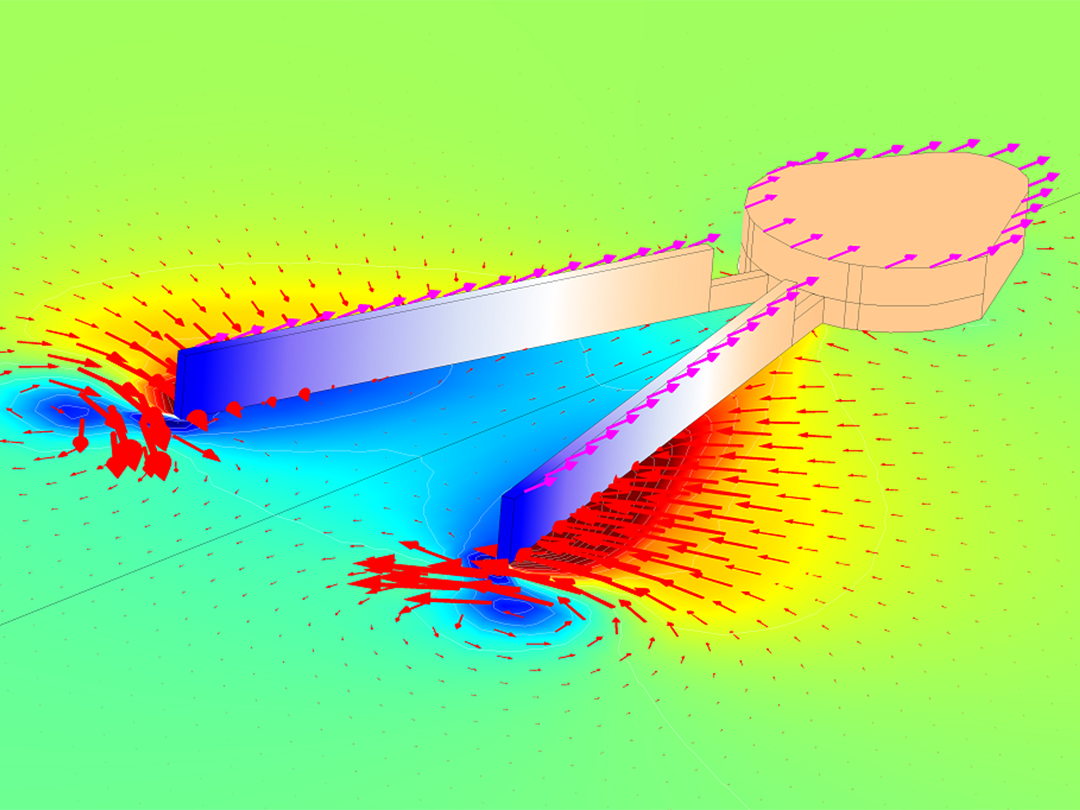
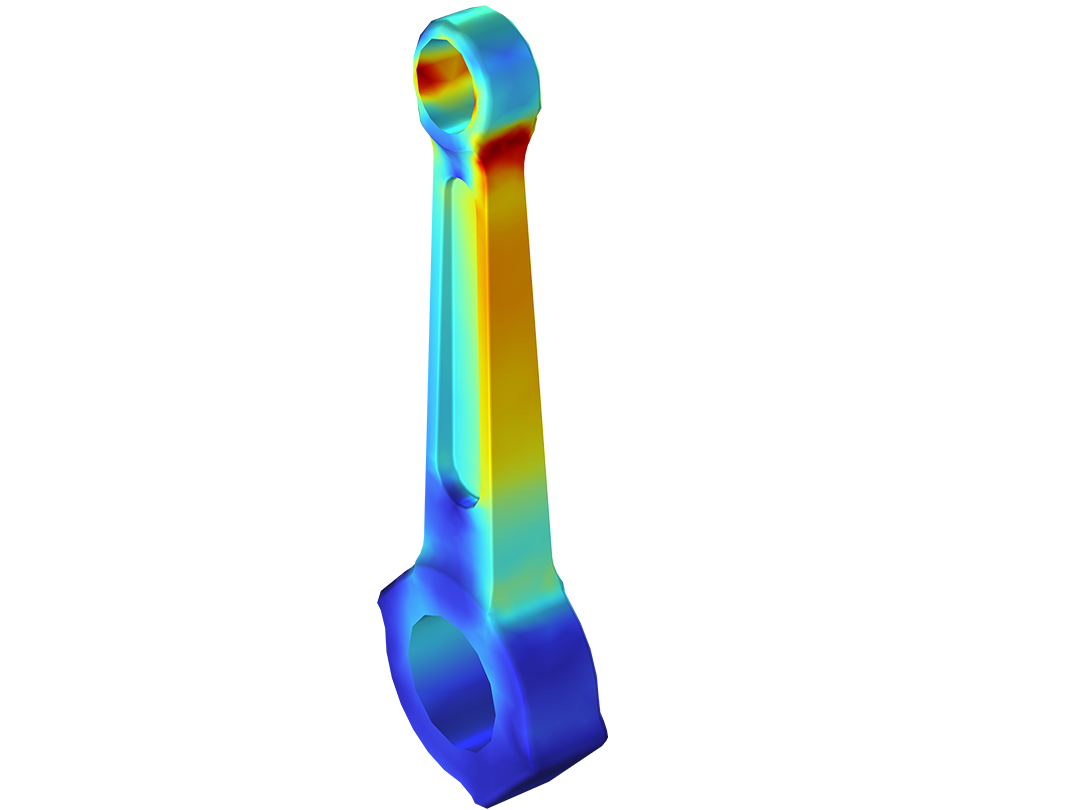
In der Regel sind alle oder die meisten Teile in einer Mehrkörpersimulation starr und werden daher nur durch die Freiheitsgrade eines starren Körpers dargestellt. Manchmal möchten Sie jedoch ein oder mehrere Teile als flexibel darstellen. Mit den im Modul verfügbaren Materialmodellen können Sie Ihrem Modell selektiv starre und flexible Teile zuweisen, um detaillierte Strukturanalysen durchzuführen, die die Auswirkungen nichtlinearer Materialien berücksichtigen. Mit dem Multibody Dynamics Module können Sie beispielsweise die Kräfte berechnen, die an den Verbindungsstellen der starren Teile der Struktur auftreten, sowie die Spannungen, die in den flexiblen Komponenten entstehen.